CAN BUS в автомобиле: для чего он нужен.
CAN BUS в автомобиле: для чего он нужен.
В настоящее время авто производители все чаще и чаще добавляют различные новшества и улучшения в свои автомобили. Это могут быть дополнительные устройства, или расширение функционала уже ранее используемых устройств. Для того, чтобы не прокладывать новую проводку к подключаемому устройства, его подключают уже к имеющимся сигнальным/управляющим проводам, так называемой Кан-шине (Can Bus).
Немецкая компания BOSCH в середине 80-х предложила автопроизводителям новую архитектуру обмена данными между устройствами — Controller Area Network или, как принято сокращенно называть — CAN BUS. Это новшество решило сразу несколько проблем. Во-первых, значительно сократилось использование количества проводов в автомобиле, общая длинна которых уже приближалась к километру, а вес к центнеру. А во-вторых, облегчило подключение новых устройств без значительных переделок в автомобиле.
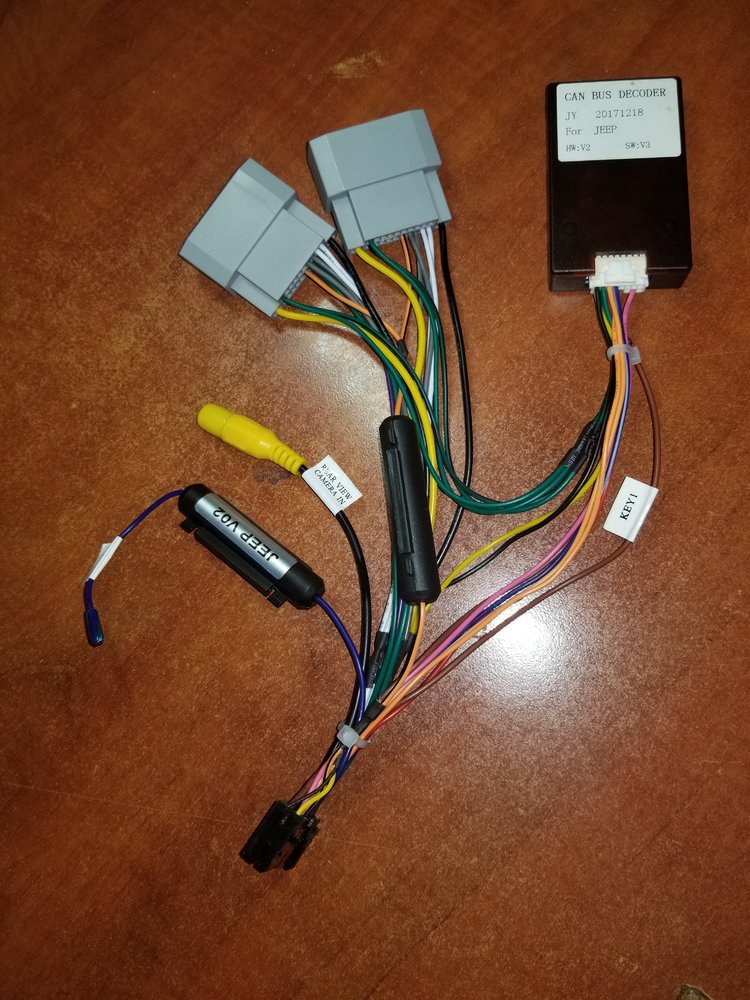
Конечно же, производители магнитол не упустили возможности использовать этот дополнительный потенциал CAN шины и в своих продуктах. Как правило, если в автомобиле присутствует CAN BUS, то необходимо использовать автомагнитолу со встроенным декодером сигналов от этой шины. В противном случае, пользователь может столкнуться с рядом существенных проблем, при подключении обыкновенной магнитолы. В частности не будет работать штатный цифровой усилитель (KIA, JBL, Pioneer, Rockford, BOSE), т.к. управление этими усилителями (включение, баланс, управление звуковыми сценами) происходит посредством передачи данным по CAN шине. Не будет работать камера заднего вида, кнопки управления на руле, трип-компьютер (отображает запас хода, расход топлива, скорость, режимы работы автомобиля и т.п.), не будет отображаться информация на экране магнитолы о состоянии парковочных датчиков, режиме работы кондиционера и прочее. Еще одной из проблем может стать разрядка АКБ автомобиля вследствие постоянно включенной автомагнитолы, т.
Как видите, проблем могут возникнуть достаточно много, что однозначно полностью перечеркнет удовольствие от покупки новой автомагнитолы.
Поэтому, приобретая новое мультимедийное головное устройство, убедитесь, совместимо ли оно с Вашим автомобилем. В случае отсутствия CAN BUS в автомобиле, Вам подойдет любая универсальная (через переходную рамку) или штатная автомагнитола. Если же в автомобиле присутствует CAN BUS, то нужно будет докупать отдельные декодеры кан-шины (питания АСС, декодер камеры, рулевого управления и т.д.), либо приобрести автомагнитолу с уже установленным декодером CAN BUS.
Canbus что это такое
Статья постоянно изменяется и дополняется по мере поступления новой информации!
Как говорить делать нечего поэтому готов выложить все в едином бортовике может кому сгодиться.
Советую для начала прочитать это
www.autodela.ru/assets/fi…ina_dannih_%20CAN%20I.pdf дабы понимать дальше о чем речь.
И так речь идет об установки Автомагнитолы в целом но на примере VW POLO.
Возможно несколько вариантов подключения автомагнитол.
1. Вариант через ISO разьем без подключения к CAN шине.
Выглядит это чудо так
Ну и со стороны магнитолы обычно вот такой кусок провода
2. Вариант через разьем Quadlock они на разных авто бывают разные. С CAN шиной (в основном) и без нее.
Вот как он выглядет на VW .
И со стороны магнитолы вот сам CAN адаптер.
но она немного может различаться. В нашем случае это не существенные отличия так как интересуют только основные 4 провода.
И так на polo бывают несколько случаев. Есть три комплектации трейдлайн, комфорд, и хайдлайн. (не важно если не правильно произнес).
Первые две это в принципе урезанные версии. Третья же тут интересная комплектация там многие вещи могут быть а многих не быть. Но щас не об этом . Одна из опций которые нас интересует это наличие так называемой CAN шине . Многие задают вопрос есть ли она у polo или нет . Я даже слышал ответы что нет.
Давайте немного теории. Что такое CAN шина. Это сетевой интерфейс посредством которого все блоки авто общаются между собой. Это Блоку рулевого управления, блок управления двигателем, блок коробки АКПП, блок доп рулевых кнопок, блок комфорта, блок вспомогательной электроники, и т.д. блоков может быть множество. Все эти блоки между собой общаются посредством CAN шины. Это как компьютерная сеть. Поэтому не быть CAN шины в автомобиле (речь о поло и подобного класса машин) просто не может быть. Управление по CAN шине просто удобно и это экономит много лишних проводов. Даже китайцы делают свои дешевые авто с применением этой технологии. И так разобрались общее понятие CAN шина и то что она присутствует.
Другое дело подведена ли CAN шина к блоку который отсутствует. Нету в комплектации. Например на трейдлайне и комфорте нету доп кнопок на руле (а это отдельный блок) или отсутсвует климат или управление задними стеклоподьемниками. ну и магнитола стоит самая простая не требующая общения с другими блоками. Polo sedan это авто к сожалению было разработано для нас и все что в ней было возможно сэкономить, сэкономлено, даже на такой мелочи как кан шина.
Понять можно в принципе по самому разьему . Если у вас ISO то скорее всего CAN не подведена. Но не факт, потому как уже встречал авто с ISO разьемом и подведенным к нему CAN шины . Если Quadlock то CAN есть скорее всего есть но опять же не факт. Встречал и без шины. Короче смотрите на распиновку. Обычно распиновка стандартная и все контакты находятся на своих местах. Кстати идеальный вариант это посмотреть распиновку родной магнитолы.
Теперь рассмотрим два способа подключения магнитолы.
Первый когда устанавливаем обычную магнитолу в которой нету CAN адаптера то есть через подключение к ISO разьему. Для этой магнитолы нужны вот эти провода.
Такие как:
1. Основное питание от аккумулятора. Для поддержания памяти (настройки радио, звука и так далее) и основного питания магнитолы. Обычно это желтый толстый провод. Но может быть и красный. Этот провод обязательно есть в колодке подключения магнитолы . Но если делать по уму для снижения просадки при хороших басах то это провод надо тянуть приличного сечения от аккумулятора разумеется через предохранитель который должен быть установлен до прохождения через перегородку (то есть в моторном отсеке).
2. ACC питание. оно нужно как сигнальное при включении ключа зажигания в положение ACC (это положение в поло появляется при включении зажигания а в других авто может быть первое положение ключа до включения зажигания. Но в поло режим ACC включаеться в момент включения зажигания и сохраняеться до момента вынимания ключа из замка. Необходимо это питание для активации (включения ) магнитолы и выключения ее при выключения ACC. Это удобно, сел в машину включил ключ, магнитола включилась. Вынул ключ магнитола вырубилась. Все автоматически. Можно конечно и не использовать этот провод. Например соеденить это провод с основным питанием но тогда прийдется выключать магнитолу вручную кнопкой ну и выключать также. Это жутко не удобно. Но подходит тем кто часто включает магнитолу без участия ключа. Кстати штатная магнитола RCD 220 может включаться и без ACC кнопкой питания. Но работает она тогда только час и потом отключается. Это сделано как защита от склероза. Но эта функция работает только если подведен специальный контакт от центрального блока (не буду заострять на этом внимание)
Но в поло режим ACC включаеться в момент включения зажигания и сохраняеться до момента вынимания ключа из замка. Необходимо это питание для активации (включения ) магнитолы и выключения ее при выключения ACC. Это удобно, сел в машину включил ключ, магнитола включилась. Вынул ключ магнитола вырубилась. Все автоматически. Можно конечно и не использовать этот провод. Например соеденить это провод с основным питанием но тогда прийдется выключать магнитолу вручную кнопкой ну и выключать также. Это жутко не удобно. Но подходит тем кто часто включает магнитолу без участия ключа. Кстати штатная магнитола RCD 220 может включаться и без ACC кнопкой питания. Но работает она тогда только час и потом отключается. Это сделано как защита от склероза. Но эта функция работает только если подведен специальный контакт от центрального блока (не буду заострять на этом внимание)

3 . Корпус ну как без него . Обычно черный. Это обычный минус. Он всегда есть во всех колодках обычно обозначен как GND.
Вот этого достаточно чтобы магнитола запустилась и работала . Но есть и другие провода необходимые магнитоле .
4. Провод ILL . Иллюминация . При появлении на этом проводе напряжения включается подсветка кнопок. Обычно на разьем приходят тоненький коричневый провод. Но его так же может не быть если подведена CAN шина. Если все же нужен это провод то его можно взять с любой кнопки подсветки.
Если все же нужен это провод то его можно взять с любой кнопки подсветки.
5. Провод питания антенны ANT это провод идет не к магнитоле а от нее. используется для питания внешнего усилителя антенны или как сигнал активации выдвижной антенны. В некоторых магнитолах может не быть . Таких как штатных магнитолах VW . В них это питание реализовано внутри самой магнитолы магнитолы. Это провод еще используют для включения внешнего усилителя. Если такого провода нет то придется его брать откуда либо от того же провода АСС. Но лучше конечно от провода ANT так как питание там появляется только при включении магнитолы.
6. Так же сигнал заднего хода. Данный провод это сигнал для включения камеры заднего хода.Так же может не быть так как данный сигнал передается и по CAN шине. Либо тянуть его от концовка заднего хода или от лампы заднего хода. Тут надо более подробно разбираться и зависит от того какой именно сигнал надо подать на магнитолу.
7. Ну и акустические провода. Рассказывать о них не буду их 8 штук точнее 4 цветных пары. Обычно в отдельном разъеме. Если у вас только передние динамики то их будет только 2 пары.
Обычно в отдельном разъеме. Если у вас только передние динамики то их будет только 2 пары.
Ну не знаю по моему все вспомнил, есть и другие но это более углубленно и редко используются.
И второй вариант с подключением по CAN шине. с гнездом Quadlock.
1. Понятное дело основное питание. Как же без него.
2. Минус. ну тут тоже понятно.
3. два провода CAN шины .
4. Ключ (иногда он есть иногда нету.) Зависит от магнитолы.
4. Акустические провода .
Вот и все . Как видно с использованием CAN шины все как бы проще.
Все . Все остольные сигналы как включения камеры, подсветка, открытие дверей, отображение настроек климата, управление кнопками на руле и так далее все происходит по CAN шине. И если у вас магнитола с Quadlock гнездом то разумеется вам нужно это подключение и нужно чтобы на авто была подведена CAN шина и установленный Quadlock разьем. Исключением может быть случай когда у вас магнитола использует внешний адаптер CAN адаптер (обычно это китайские магнитолы). В таком случае такую магнитолу можно подключить и к ISO разьему убрав CAN адаптер. Для этого просто изучите распиновку разъема возле самого ГУ и сопоставите с описанием выше двух способов.
В таком случае такую магнитолу можно подключить и к ISO разьему убрав CAN адаптер. Для этого просто изучите распиновку разъема возле самого ГУ и сопоставите с описанием выше двух способов.
На VW polo, как я и писал выше может быть два варианта . У вас установлен ISO разьем без подведенной CAN шины. И Второй вариант с разьемом Quadlock с CAN шиной. Хорошо если у вас все совпало. То просто подключаем и наслаждаемся звуком но вот если нет. Тем более если у вас стоит Quadlock то есть варианты что на нем не будут некоторые доп сигналы. Тут надо подходить индивидуально .
Но бывают варианты когда нужно подключить магнитолу с Quadlock гнездом к авто в котором нету Quadlock разьема в место него ISO разьем нету CAN шины а надо поставить штатное ГУ в котором Quadlock гнездо и соответственно необходимо наличие CAN шины. Вот об этом варианте и речь ниже.
Ну в принципе если есть руки и голова то все можно сделать. Для начала надо определиться каким путем мы пойдем. Первый как я считаю правильный это взять удалить ISO разьем и вместо него поставить Quadlock. Это не значит что вам прийдеться резать и паять. Нет все гараздо проще. Для начала разыскиваем сам Quadlock разьем . Их можно купить на али экспресе вместе с кусками проводов. Или на разборке. но берите именно с кусками проводов. На 2 штуки понадобиться. Берем две распечатки распиновки разьема.
Это не значит что вам прийдеться резать и паять. Нет все гараздо проще. Для начала разыскиваем сам Quadlock разьем . Их можно купить на али экспресе вместе с кусками проводов. Или на разборке. но берите именно с кусками проводов. На 2 штуки понадобиться. Берем две распечатки распиновки разьема.
Современные автомобильные аудиосистемы постоянно совершенствуются, добавляются дополнительные динамики, цифровые усилители, сабвуферы и пр.
Для подключения сторонних устройств необходимы специальные переходники (can-bus адаптеры), которые позволяют задействовать все функции и реализовать требования бортовой системы автомобиля.
Can-bus адаптер управляет запуском цифрового усилителя (Pioneer, Rockford, BOSE, KIA, JBL), отправляет сигнал для активации камеры заднего вида, с информацией от парковочной системы, управляет трип компьютером и позволяет отображать всю эту информацию экране мультимедиа (информация о режиме, радио частоте, воспроизведенных треках).
В зависимости от автомобиля can-bus адаптеры выполняют различные функции.
В автомобилях Toyota, в которых присутствует усилитель, используется адаптер для его полноценной работы с магнитолой. Адаптер позволяет управлять «звуковой схемой» автомобиля – регулировать громкость звука между передними и задними колонками, левой и правой стороной автомобиля, а также громкостью самого усилителя. В большинстве производимых и продаваемых головных устройств данная функция не предусмотрена.
Особо стоит отметить can-bus адаптер для KIA Sorento и KIA Sportage, в которых установлен цифровой усилитель. В этом случае передача звука в цифровом виде исключает любые наводки, шумы и помехи.
Нужно быть готовым к тому, что магнитолы, которые не имеют адаптеров для работы с цифровым усилителем, будут подключаться напрямую к колонкам. При такой схеме подключения вы лишаетесь усилителя, а вместе с ним и надежды на качественный звук. Единственной гарантией правильной установки может быть can-bus адаптер, который будет установлен в автомобиле для сопряжения с цифровым усилителем.
В автомобилях Volkswagen/Skoda сигнал разрешения включения аксессуаров (ACC), кнопки рулевого управления, подсветка и прочие сигналы передаются через can шину автомобиля. Без использования правильного can-bus адаптера необходимо серьезное вмешательство во внутреннюю проводку авто, учитывая все последствия такого вмешательства. Также на экране максидот в авто должны отображаться номер радиостанции и прочая информация о состоянии магнитолы.
В автомобилях Mazda can-bus адаптер нужен для работы трип компьютера, а также для подключения и правильного функционирования усилителя. При замене головного устройства и установки адаптера кнопка INFO переносится на руль, что делает управление магнитолой более комфортным. Более того, в некоторых версиях Mazda 3 (арабская, китайская, бразильская сборка), где функция вывода данных от трип компьютера не предусмотрена, устанавливая магнитолу и can-bus адаптер вы получаете новые функции в вашем автомобиле — трип компьютер (средний и мгновенный расход топлива, запас хода, среднюю скорость и т. п.). Таким образом, вы получаете не только качественный звук, навигацию, но и расширяете функциональность своего автомобиля.
п.). Таким образом, вы получаете не только качественный звук, навигацию, но и расширяете функциональность своего автомобиля.
Can-bus адаптер для автомобилей Mitsubishi (Pajero, Outlander XL, ASX, LancerX) выполняет функцию подключения магнитолы к цифровому усилителю Rockford.
В цифровых усилителях Rockford Fosgate, которыми комплектуются автомобили Mitsubishi, должен быть реализован следующий функционал:
— пятиступенчатая регулировка сабвуфером
— регулировка баланса звука: фронт-тыл, лево-право
— постановка усилителя в режим MUTE
— отключение усилителя, когда он не используется.
Покупая штатную магнитолу убедитесь, что после ее установки вы не потеряете исходный функционал. Любое усовершенствование в автомобиле должно улучшать его, а не наоборот. Использование качественных can-bus адаптеров позволит не только грамотно установить магнитолу, но и расширить функциональность вашего авто.
CAN (англ. Controller Area Network — сеть контроллеров) — стандарт промышленной сети, ориентированный, прежде всего, на объединение в единую сеть различных исполнительных устройств и датчиков. Режим передачи — последовательный, широковещательный, пакетный.
Режим передачи — последовательный, широковещательный, пакетный.
CAN разработан компанией Robert Bosch GmbH в середине 1980-х и в настоящее время широко распространён в промышленной автоматизации, технологиях «умного дома», автомобильной промышленности и многих других областях. Стандарт для автомобильной автоматики.
Содержание
Описание стандарта [ править | править код ]
Непосредственно стандарт CAN компании Bosch определяет передачу в отрыве от физического уровня — он может быть каким угодно, например, радиоканалом или оптоволокном. Но на практике под CAN-сетью обычно подразумевается сеть топологии «шина» с физическим уровнем в виде дифференциальной пары, определённым в стандарте ISO 11898. Передача ведётся кадрами, которые принимаются всеми узлами сети. Для доступа к шине выпускаются специализированные микросхемы — драйверы CAN-шины.
Общие сведения [ править | править код ]
CAN является синхронной шиной с типом доступа Collision Resolving (CR, разрешение коллизии), который, в отличие от Collision Detect (CD, обнаружение коллизии) сетей (Ethernet), детерминировано (приоритетно) обеспечивает доступ на передачу сообщения, что особо ценно для промышленных сетей управления (fieldbus). Передача ведётся кадрами. Полезная информация в кадре состоит из идентификатора длиной 11 бит (стандартный формат) или 29 бит (расширенный формат, надмножество предыдущего) и поля данных длиной от 0 до 8 байт. Идентификатор говорит о содержимом пакета и служит для определения приоритета при попытке одновременной передачи несколькими сетевыми узлами.
Передача ведётся кадрами. Полезная информация в кадре состоит из идентификатора длиной 11 бит (стандартный формат) или 29 бит (расширенный формат, надмножество предыдущего) и поля данных длиной от 0 до 8 байт. Идентификатор говорит о содержимом пакета и служит для определения приоритета при попытке одновременной передачи несколькими сетевыми узлами.
Рецессивные и доминантные биты [ править | править код ]
Для абстрагирования от среды передачи спецификация CAN избегает описывать биты данных как «0» и «1». Вместо этого применяются термины «рецессивный» бит и «доминантный» бит, при этом подразумевается, что при передаче одним узлом сети рецессивного бита, а другим доминантного, принят будет доминантный бит. Например, при реализации физического уровня на радиоканале отсутствие сигнала означает рецессивный бит, а наличие — доминантный; тогда как в типичной реализации проводной сети рецессив бывает при наличии сигнала, а доминант, соответственно, при отсутствии. Стандарт сети требует от «физического уровня», фактически, единственного условия: чтобы доминантный бит мог подавить рецессивный, но не наоборот. Например, в оптическом волокне доминантному биту должен соответствовать «свет», а рецессивному — «темнота». В электрическом проводе может быть так: рецессивное состояние — высокое напряжение на линии (от источника с большим внутренним сопротивлением), доминантное — низкое напряжение (доминантный узел сети «подтягивает» линию на землю). Если линия находится в рецессивном состоянии, перевести её в доминантное может любой узел сети (включив свет в оптоволокне или закоротив высокое напряжение). Наоборот — нельзя (включить темноту нельзя).
Например, в оптическом волокне доминантному биту должен соответствовать «свет», а рецессивному — «темнота». В электрическом проводе может быть так: рецессивное состояние — высокое напряжение на линии (от источника с большим внутренним сопротивлением), доминантное — низкое напряжение (доминантный узел сети «подтягивает» линию на землю). Если линия находится в рецессивном состоянии, перевести её в доминантное может любой узел сети (включив свет в оптоволокне или закоротив высокое напряжение). Наоборот — нельзя (включить темноту нельзя).
Виды кадров [ править | править код ]
- Кадр данных (data frame) — передаёт данные;
- Кадр удаленного запроса (remote frame) — служит для запроса на передачу кадра данных с тем же идентификатором;
- Кадр перегрузки (overload frame) — обеспечивает промежуток между кадрами данных или запроса;
- Кадр ошибки (error frame) — передаётся узлом, обнаружившим в сети ошибку.
Кадры данных и запроса отделяются от предыдущих кадров межкадровым промежутком.
Формат кадра [ править | править код ]
Базовый формат кадра данных [ править | править код ]
| Поле | Длина (в битах) | Описание |
|---|---|---|
| Начало кадра (SOF) | 1 | Сигнализирует начало передачи кадра |
| Идентификатор | 11 | Уникальный идентификатор |
| Запрос на передачу (RTR) | 1 | Должен быть доминантным |
| Бит расширения идентификатора (IDE) | 1 | Должен быть доминантным (определяет длину идентификатора) |
| Зарезервированный бит (r0) | 1 | Резерв |
| Длина данных (DLC) | 4 | Длина поля данных в байтах (0-8) |
| Поле данных | 0-8 байт | Передаваемые данные (длина в поле DLC) |
| Контрольная сумма (CRC) | 15 | Контрольная сумма всего кадра |
| Разграничитель контрольной суммы | 1 | Должен быть рецессивным |
| Промежуток подтверждения (ACK) | 1 | Передатчик шлёт рецессивный, приёмник вставляет доминанту |
| Разграничитель подтверждения | 1 | Должен быть рецессивным |
| Конец кадра (EOF) | 7 | Должен быть рецессивным |
Первые 7 бит идентификатора не должны быть все рецессивными.
Расширенный формат кадра данных [ править | править код ]
| Поле | Длина (в битах) | Описание |
|---|---|---|
| Начало кадра (SOF) | 1 | Сигнализирует начало передачи кадра |
| Идентификатор A | 11 | Первая часть идентификатора |
| Подмена запроса на передачу (SRR) | 1 | Должен быть рецессивным |
| Бит расширения идентификатора (IDE) | 1 | Должен быть рецессивным (определяет длину идентификатора) |
| Идентификатор B | 18 | Вторая часть идентификатора |
| Запрос на передачу (RTR) | 1 | Должен быть доминантным |
| Зарезервированные биты (r1 и r0) | 2 | Резерв |
| Длина данных (DLC) | 4 | Длина поля данных в байтах (0-8) |
| Поле данных | 0-8 байт | Передаваемые данные (длина в поле DLC) |
| Контрольная сумма (CRC) | 15 | Контрольная сумма всего кадра |
| Разграничитель контрольной суммы | 1 | Должен быть рецессивным |
| Промежуток подтверждения (ACK) | 1 | Передатчик шлёт рецессивный, приёмник вставляет доминанту |
| Разграничитель подтверждения | 1 | Должен быть рецессивным |
| Конец кадра (EOF) | 7 | Должен быть рецессивным |
Идентификатор получается объединением частей A и B.
Формат кадра удаленного запроса [ править | править код ]
Совпадает с кадрами данных стандартного или расширенного формата, за двумя исключениями:
- В поле RTR рецессив вместо доминанты.
- Отсутствует поле данных.
Арбитраж доступа [ править | править код ]
При свободной шине любой узел может начинать передачу в любой момент. В случае одновременной передачи кадров двумя и более узлами проходит арбитраж доступа: передавая идентификатор, узел одновременно проверяет состояние шины. Если при передаче рецессивного бита принимается доминантный — считается, что другой узел передаёт сообщение с большим приоритетом, и передача откладывается до освобождения шины. Таким образом, в отличие, например, от Ethernet в CAN не происходит непроизводительной потери пропускной способности канала при коллизиях. Цена этого решения — возможность того, что сообщения с низким приоритетом никогда не будут переданы.
Контроль ошибок [ править | править код ]
CAN имеет несколько механизмов контроля и предотвращения ошибок:
- Контроль передачи: при передаче битовые уровни в сети сравниваются с передаваемыми битами.

- Дополняющие биты (bit stuffing): после передачи пяти одинаковых битов подряд автоматически передаётся бит противоположного значения. Таким образом кодируются все поля кадров данных или запроса, кроме разграничителя контрольной суммы, промежутка подтверждения и EOF.
- Контрольная сумма: передатчик вычисляет её и добавляет в передаваемый кадр, приёмник считает контрольную сумму принимаемого кадра в реальном времени (одновременно с передатчиком), сравнивает с суммой в самом кадре и в случае совпадения передаёт доминантный бит в промежутке подтверждения.
- Контроль значений полей при приёме.

Разработчики оценивают вероятность невыявления ошибки передачи как 4,7×10 −11 .
Скорость передачи и длина сети [ править | править код ]
Диапазон скоростей [ править | править код ]
Все узлы в сети должны работать с одной скоростью. Стандарт CAN не определяет скоростей работы, но большинство как отдельных, так и встроенных в микроконтроллеры адаптеров позволяют плавно менять скорость в диапазоне, по крайней мере, от 20 килобит в секунду до 1 мегабита в секунду. Существуют решения, выходящие далеко за рамки данного диапазона.
Существуют решения, выходящие далеко за рамки данного диапазона.
Предельная длина сети [ править | править код ]
Приведённые выше методы контроля ошибок требуют, чтобы изменение бита при передаче успело распространиться по всей сети к моменту замера значения. Это ставит максимальную длину сети в обратную зависимость от скорости передачи: чем больше скорость, тем меньше длина. Например, для сети стандарта ISO 11898 предельные длины составляют приблизительно:
| 1 Мбит/с | 40 м |
| 500 кбит/с | 100 м |
| 125 кбит/с | 500 м |
| 10 кбит/с | 5000 м |
Использование оптопар для защиты устройств от высоковольтных помех в сети ещё больше сокращает предельную длину, тем больше чем больше задержка сигнала в оптопаре. Сильно разветвлённые сети (паутина) также снижают скорость из-за множества отражений сигнала и большей электрической ёмкости шины.
Протоколы высокого уровня [ править | править код ]
Базовой спецификации CAN недостаёт многих возможностей, требуемых в реальных системах: передачи данных длиннее 8 байт, автоматического распределения идентификаторов между узлами, единообразного управления устройствами различных типов и производителей. Поэтому вскоре после появления CAN на рынке начали разрабатываться протоколы высокого уровня для него. В число распространённых на данный момент протоколов входят:
Поэтому вскоре после появления CAN на рынке начали разрабатываться протоколы высокого уровня для него. В число распространённых на данный момент протоколов входят:
Применение CAN в автомобилестроении [ править | править код ]
Во всех высокотехнологичных системах современного автомобиля применяется CAN-протокол для связи ЭБУ с дополнительными устройствами и контроллерами исполнительных механизмов и различных систем безопасности. В некоторых автомобилях CAN связывает IMMO, приборные панели, SRS блоки и т. д.
Также протокол CAN ISO 15765-4 вошел в состав стандарта OBD-II.
Canbus что это такое в лампах, stm32 can bus
CAN BUS – это автомобильная шина, разработанная Робертом Бошем, которая преимущественно принята в автомобильной и авиакосмической индустрии. CAN это серийный протокол шины, с подключением отдельных систем и датчиков как альтернатива обычному много-проводному пучку. Позволяет связать автомобильные компоненты в один или двойной провод называемый сетью шины данных на скорости более 1 Мегабита. До того как была выпушена CAN шина, автомобили имели большое количество проводки которая была необходима для соединения различных электронных компонентов.
До того как была выпушена CAN шина, автомобили имели большое количество проводки которая была необходима для соединения различных электронных компонентов.
Первый автомобиль с шиной CAN был представлен в 1986 году – это BMW 850 купе. За счет использование данной шины в автомобиле было использовано меньше проводки на 2 километра, общий сброшенный вес составил 50 кг. Впервые, каждый из автомобильных систем и датчиков где способность соединения на очень высокой скорости (25КБ/c – 1Мегабит) на одинарном или сдвоенном проводе линии соединения противоположенная предыдущей мультипроводной проводке. Как бы то ни было, введение CAN шины так же увеличивает степень интеграции автомобилей и делает установку не оригинального оборудования сложнее для выполнения. Чтобы Вы имели возможность насладиться всеми преимуществами светодиодного освещения, в нашем интернет-магазине представлены LED лампочки CAN-BUS, которые и приспособлены для корректной работы в данной шине с компьютером автомобиля.
С начала 2008 года Ассоциация Автомобильных Инженеров (SAE) потребовала 100% для продаваемых автомобилей в США использовать протокол соединения CAN BUS, Евросоюз имеет аналогичные законы.
В последнее время, как в автомобилях так и в промышленной автоматике, очень часто стал применяться так называемая CAN (Controller Area Network) шина. Высокая скорость передачи данных, отличная помехоустойчивость и возможность объединения множества устройств в одну сеть, делают ее практически вне конкуренции с другими шинами. Для передачи данных по КАН шине достаточно двух проводов, или иными словами одна витая пара. Подробности работы CAN шины описаны неоднократно, кому интересно тот найдет и почитает. Нас больше интересует как же подключится с помощью компьютера, ноутбука или планшета к шине КАН. Для данной задачи я изготовил
адаптер шины USB to CAN
который позволяет подключится с помощью ПК к любой CAN шине, смотреть пакеты которые по ней идут, записывать их, а также есть полноценная возможность слать свои данные в CAN шину!
Адаптер USB to CAN будет полезен авто электрикам, он отлично подходит для отслеживания пакетов людям которые изготавливают CAN подмотки одометров, а так же инженерам которые работают с автоматикой, которая использует КАН шину.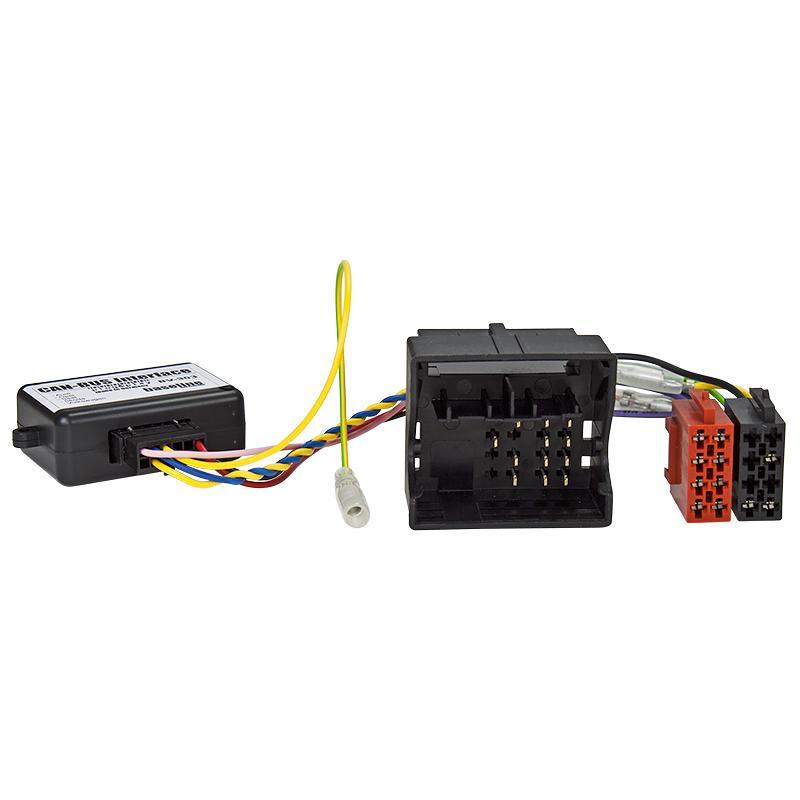
Устройство выполнено с применением микроконтроллера фирмы microchip PIC18F1XK50. как контроллере с SPI интерфейсом MCP2515, и высокоскоростного КАН трансивера mcp2551. ВАЖНО!!! микросхемы КАН контроллера MCP2515 бывают в разных корпусах, и у них не совпадают выводы, плата разведена под MCP2515IST. если будете пихать с другими буквами придется брать даташит, сверять ноги и разводить под ваш экземпляр. Нумерация выводов в плате и схеме не совпадает, так как на схеме MCP2515 нарисована в другом корпусе!
И так вот схема адаптера USB to CAN.
В принципе ничего особо сложного, если сравнивать с теми схемами которые гуляют по сети. Схема 100% работает, я по мимо того что сделал прототип я его еще и испытывал, если не поленюсь то запишу видео, как работает с CAN подмоткой спидометра, а может и на работе к автоматике подключу для наглядности. Собственно под сей девайс я развел печатную плату, по размерам получилось 55 х 45мм. все компоненты SMD кроме нескольких перемычек. Вот собственно и плата.
Ну я думаю все понятно где что, на плате предусмотрена перемычка бутлоудера для программирования контроллера, так же перемычка терминатора, и собственно контакты шины CAN. плату делал пленочным фоторезистом, ничего сложного в ней нет, разьем стоит MINIUSB не микро!
Для работы с КАН адаптером можно использовать разные программы, но я рекомендую программу CANHacker, про нее будет отдельная статья с вылеченной от жадности разработчиков рабочей прогой, она достаточно функциональна, имеет функцию фильтрации пакетов, что часто бывает просто незаменимо, также запись данных как с шины, так и в шину, в том числе и записанных ранее (эмуляция работы некого устройства).
Теперь самое интересное, прошивка) а там все интересно, я уже не помню но по моему шил все через USB без программатора, ну короче вам повезет если с завода у вас прошит бутлоадер в контроллере, если нет то в архиве с прошивкой есть описание как прошится. В архиве самая последняя версия прошивки, бутлоадер на всякий случай, драйвера под виндовс и линукс, в общем разберетесь. При прошивке не забываем установить перемычку BOOT.
При прошивке не забываем установить перемычку BOOT.
=====================================
В папке Bootloader есть хекс файл его нужно прошить в контроллер, программатором! потом поставить перемычку бутлодера, и подключить к компу по юсб. далее утилитой Mphidflash заливаем черею юсб прошивку, команда mphidflash -Write USBtin_firmware_v1.7.hex, после обновления отключаем кабель, снимаем перемычку, и устройство готово!, ставим драйвера и пользуемся. Ну по крайней мере по памяти было все как-то так)
=====================================
Правильно прошитое и работающее устройство должно определится как ком порт.
Так же коротенькое видео работы КАН интерфейса с перехватом пакетов от промышленного оборудования.
mcp2515.pdf (cкачиваний: 1700)
Посмотреть онлайн файл: mcp2515.pdf
mcp2551.pdf (cкачиваний: 1043)
Посмотреть онлайн файл: mcp2551. pdf
pdf
COB светодиодные лампы с CANBUS. Что такое COB светодиоды и зачем им CANBUS?
COB светодиоды это новое поколение SMD светодиодов. COB технология позволила разместить на небольшом пространстве большое количество светодиодов в одном корпусе на алюминиевой подложке. Что позволил добиться высокой яркости, компактности конструкции и хорошего охлаждения кристаллов
Если посмотреть на фотографию COB светодиода w5w t10 CANBUS то видно большое количество кристаллов близко расположенных к друг другу
COB светодиоды w5w t10 CANBUS
Для расположения такого же количества smd светодиодов потребовалась площадь минимум в три раза больше да ещё громоздкий радиатор!
Пару лет назад COB светодиоды стоили дорого. Сейчас же цена сопоставима с недорогими smd светодиодами
С COB мы разобрались. Теперь поговорим о CANBUS. Светодиодные лампы с CANBUS понадобятся нам для замены наружных ламп автомобиля ( в передних или задних фарах, подсветке номера) в машине с CAN шиной (VW, Audi, Scoda, BMW, Seat, Chevrolet …) После установки светодиодной лампы без CANBUS машина будет ругаться (высветится ошибка БК), о неисправной, перегоревшей лампе!
Для установки ламп внутри салона CANBUS не нужна. Подойду обычные светодиодные лампы без CANBUS
Подойду обычные светодиодные лампы без CANBUS
Кто то скажет — можно поставить обычные светодиодные лампы без CANBUS просто отключив опрос исправности ламп в машине. Тогда ошибка исчезнет. На мой взгляд так делать не стоит. Опрос исправности ламп полезная функция в автомобиле, информирующая вас об исправности наружного света что так же влияет на безопасность!
Блок согласования Smart Connect (Can-Bus). Что это такое и зачем он нужен?
Часто при покупке или установке фаркопа Вам предлагают приобрести «блок согласования». Разбираемся — для чего он нужен и почему нельзя ограничится обычным универсальным комплектом электрики для подлючения фаркопа на то или иное авто.
Smart Connect — с английского языка можно перевести, как «умное подключение». Именно так и происходит подключение электрики у современных автомобилей, оснащенных сложными электронными схемами и бортовыми компьютерами.
В современных автомобилях применяется так называемая can-bus (кан-шина) или другие разновидности аналоговых и цифровых шин. Шина can-bus необходима для управления сложными системами безопасности и системами улучшения комфорта водителя(ABS, ESP, TSP и др). Эти системы в свою очередь используют множество датчиков, от каждого датчика проходит как минимум один провод, поэтому кан-шина подразумевает подключение огромного количества всевозможных проводов.
Шина can-bus необходима для управления сложными системами безопасности и системами улучшения комфорта водителя(ABS, ESP, TSP и др). Эти системы в свою очередь используют множество датчиков, от каждого датчика проходит как минимум один провод, поэтому кан-шина подразумевает подключение огромного количества всевозможных проводов.
Кан-шиной управляет бортовой компьютер, когда все сигналы идут всего лишь по двум проводам. Когда необходимо принять определенный сигнал в нужном месте, там же устанавливается приемный блок дешифровки, который соединяется с потребителем сигнала (датчиком, моторчиком и др. механизмом).
В случае с использованием фаркопа в легковом автомобиле ситуация выглядит следующим образом. К дешифратору блоков задних световых фонарей автомобиля (стопы, габариты, противотуманки, поворотники, задний ход и др.) приходят два провода а выходят восемь или десять. Теоретически можно попытаться подключиться к проводам уже после дешифратора и не ставить блок согласования Smart Connect. Но не все так просто к сожалению, при такой попытке подключения автомобиль отреагирует срабатыванием системы Check Control (CC). Двойное увеличение нагрузки из-за светотехники прицепа приводит к изменению сопротивления цепи. В свою очередь бортовой компьютер автомобиля отреагирует на необъяснимое изменение силы тока. Реакция может быть разной, от попытки отключения цепи, определения задних фонарей как неисправных, до различных «глюков» светотехники и выхода из строя отдельных узлов автомобиля. Вот от таких неприятностей и спасает блок согласования Smart connect.
Но не все так просто к сожалению, при такой попытке подключения автомобиль отреагирует срабатыванием системы Check Control (CC). Двойное увеличение нагрузки из-за светотехники прицепа приводит к изменению сопротивления цепи. В свою очередь бортовой компьютер автомобиля отреагирует на необъяснимое изменение силы тока. Реакция может быть разной, от попытки отключения цепи, определения задних фонарей как неисправных, до различных «глюков» светотехники и выхода из строя отдельных узлов автомобиля. Вот от таких неприятностей и спасает блок согласования Smart connect.
Как происходит подключение через Smart Connect?
Электрика с блоком can-bus подключается также, как и обычная универсальная энергия — обжимными клипсами параллельным подключением. Но подключение производится к блоку согласования а не к розетке фаркопа. Сам блок согласования подключается дополнительно к аккумулятору или проводу питания. В таком случае с подключенным прицепом вы получаете только управляющий сигнал на включение того или иного электроприбора, а питание на розетку фаркопа идет уже через выходы блока смарт коннект, которые запитаны от бортового аккумулятора напрямую. Поэтому исключены потери энергии в электросистеме машины, которую контролирует бортовой компьютер, Он просто не регистрирует неопознанных внешних подключений. Универсальный блок согласования устанавливается на большинство современных авто.
Поэтому исключены потери энергии в электросистеме машины, которую контролирует бортовой компьютер, Он просто не регистрирует неопознанных внешних подключений. Универсальный блок согласования устанавливается на большинство современных авто.
Купить блок согласования smart connect можно в магазине прицепов.
Важно!
Если Ваш авто оснащен режимом буксировки прицепа, при использовании smart connect режим работать не будет. Для активации таких и некоторых других режимов нужно использовать оригинальные блоки согласования для конкретного авто.
контроллер стандарта CAN 2.0b| карта с CAN интерфейсом
Controller Area Network (CAN) — стандарт сетей, объединяющих контроллеры, датчики, исполнительные и другие устройства.
CAN BUS представляет из себя стандарт, который был разработан компанией Robert Bosch GmbH в 1983г. для применения в области автомобильной электроники и автоматики. Стандарт CAN2.0 описывает канальный уровень передачи данных на шине с типом доступа CSMA/CD+AMP (Carrier-Sense, Multiple-Access protocol with Collision Detection and Arbitration on Message Priority).
Стандарт CAN2.0 описывает канальный уровень передачи данных на шине с типом доступа CSMA/CD+AMP (Carrier-Sense, Multiple-Access protocol with Collision Detection and Arbitration on Message Priority).
CSMA означает, что каждый абонент сети прежде чем начать передачу, ожидает определённый период неактивности на шине. CD+AMP означает, что коллизии на шине разрешаются посредством арбитража, основанном на приоритете сообщения. При этом абонент, передающий сообщение с наибольшим приоритетом, продолжает передачу. Такое решение позволяет максимально эффективно использовать пропускную способность CAN шины.
Передача данных в CAN интерфейсе
Информация передаётся сообщениями (кадрами). Кадр содержит:
— Идентификатор данных (11бит — CAN2.0A, 29бит — CAN2.0B). Это не адрес абонента, как во многих других сетях, а идентификатор данных, определяющий приоритет сообщения. Идентификатор может содержать тип передаваемых данных, уникальный номер, прочую информацию (определяется протоколами более высокого уровня).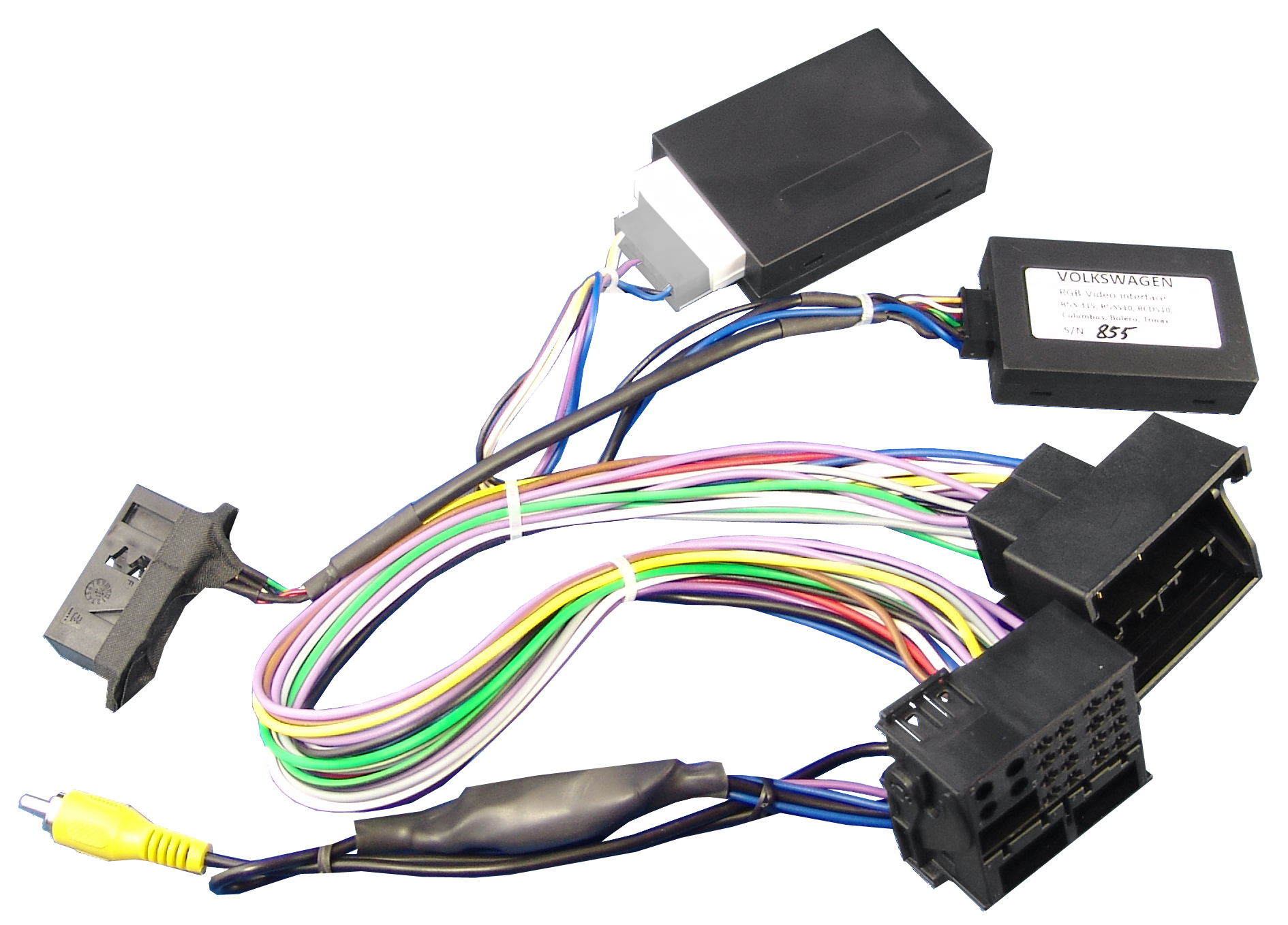 Как правило, каждый абонент имеет на входе фильтр сообщений и принимает только нужные ему сообщения.
Как правило, каждый абонент имеет на входе фильтр сообщений и принимает только нужные ему сообщения.
— Данные (0-8 байт). Содержимое определяется протоколом более высокого уровня (уникальный или один из стандартных: ARINC 825, CANopen, CAN Kingdom, DeviceNet, SAE J1939 и других). Не содержит данных только кадр запроса. В ответ на запрос абоненты, имеющие данные на передачу с таким же идентификатором, что и запрос, должны начать отправку данных.
— Контрольная сумма (2 байта), вычисляемая по алгоритму CRC-16. Каждый абонент проводит проверку контрольной суммы всех сообщений, передаваемых через сеть. Независимо от того, принимает ли он данное сообщение (прошло оно входной фильтр) или нет.
— Подтверждение. Каждый абонент, принявший сообщение без ошибок, выставляет бит подтверждение приёма.
— Служебные биты и межкадровый интервал.
Специфика топологии CAN шины
Стандартный алгоритм обнаружения и обработки ошибок, который должен быть реализован каждым абонентом сети, позволяет исключать из обмена аварийных абонентов (неправильно подключенных или сконфигурированных) и продолжать работу.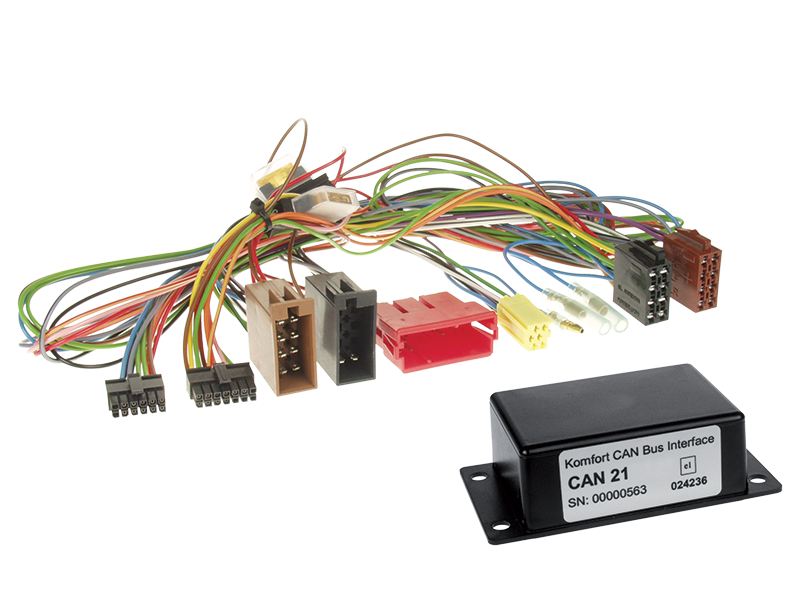
Физический уровень каждого абонента сети содержит ФАПЧ, используемый для подстройки разницы тактовых генераторов скоростей передачи абонентами, времени распространения сигнала. При работе на несбалансированных, зашумлённых линиях дополнительно может применяться ФНЧ.
CAN интерфейс приобрёл популярность благодаря своей надёжности, простоте и гибкости. На основе CAN можно организовать простую в реализации, не дорогую сеть датчиков, исполнительных механизмов и контроллеров, обладающую всеми достоинствами стандарта. С использованием протоколов более высокого уровня можно построить системы реального времени для связи блоков управления, реализовать алгоритмы управления сетью с большим числом абонентов, шлюзы с другими сетями CAN.
Стандарт получил широкое распространение и применение в автомобильной, железнодорожной, промышленной автоматике, а также в военной технике. Контроллер CAN интерфейса «on-chip» имеют многие микроконтроллеры и микропроцессоры для встраиваемых систем.
ISO 11898
В 1993г. Международной Организацией по Стандартизации был принят стандарт ISO 11898, содержащий в своей основе CAN 2.0. Впоследствии ISO 11898 был дополнен и разделён на части, которые описывают уровни протокола CAN для различных применений.
ISO 11898-1:2003 определяет канальный и физический уровни передачи данных сети CAN контроллеров. Документ описывает архитектуру сетей на основе модели Открытых Систем (OSI — Open System Interconnection), описывает механизмы обмена информацией между CAN модулями, реализующими канальный уровень с детальным описанием подуровней: управления логической связью (LLC — Logical Link Control) и управления доступом к среде (MAC — Media Access Control).
ISO 11898-2:2003 определяет физический уровень высокоскоростных (до 1Мбит/с) сетей контроллеров при передаче информации по дифференциальной сбалансированной линии (витая пара). Данный тип сетей CAN является самым распространенным.
ISO 11898-3:2006 определяет определяет физический уровень низкоскоростных (от 40Кбит/с до 125Кбит/с) отказоустойчивых сетей контроллеров в автомобильной автоматике. Стандарт допускает не только линейную топологию сети (шина, как в ISO 11898-2), но и соединение типа «звезда» или комбинацию типов.
Стандарт допускает не только линейную топологию сети (шина, как в ISO 11898-2), но и соединение типа «звезда» или комбинацию типов.
ISO 11898-4:2004 определяет сети контроллеров can интерфейса, синхронизированных по времени (TTCAN — Time Triggered CAN). Документ описывает компоненты такой сети и организацию работы (циклы, суперциклы синхронизации). Стандарт широко используется для построения сетей реального времени.
Платы с интерфейсом CAN Bus для шины PCI Express компании «Новомар»
Модули mPCIe-CAN в формате Mini PCI Express полностью удовлетворяют требованиям стандартов CAN2.0A, CAN2.0B, ISO 11898-1, ISO 11898-2, ISO 11898-3. Контроллеры CAN шины имеют средства реализации для прикладного ПО стандарта ISO 11898-4 и других промышленных стандартов на основе CAN.
Компании «Новомар» удалось обеспечить ряд уникальных особенностей, сохранив при этом стандартные габариты плат формата mini PCIe:
— два независимых интерфейса CAN-Bus;
— гальваническая изоляция каждого интерфейса;
— многоуровневая защита от аварий на линии;
— опциональный фильтр ФНЧ;
— опциональное терминирование каждой CAN сети резистором 100 Ом.
Введение в протокол CAN | CAN — технологии
Промышленная сеть реального времени CAN представляет собой сеть с общей средой передачи данных. Это означает, что все узлы сети одновременно принимают сигналы передаваемые по шине. Невозможно послать сообщение какому-либо конкретному узлу. Все узлы сети принимают весь трафик передаваемый по шине. Однако, CAN-контроллеры предоставляют аппаратную возможность фильтрации CAN-сообщений.
Каждый узел состоит из двух составляющих. Это собственно CAN контроллер, который обеспечивает взаимодействие с сетью и реализует протокол, и микропроцессор (CPU).
Рис. 1. Топология сети CAN.CAN контроллеры соединяются с помощью дифференциальной шины, которая имеет две линии — CAN_H (can-high) и CAN_L (can-low), по которым передаются сигналы. Логический ноль регистрируется, когда на линии CAN_H сигнал выше, чем на линии CAN_L. Логическая единица — в случае когда сигналы CAN_H и CAN_L одинаковы (отличаются менее чем на 0. 5 В). Использование такой дифференциальной схемы передачи делает возможным работу CAN сети в очень сложных внешних условиях. Логический ноль — называется доминантным битом, а логическая единица — рецессивным. Эти названия отражают приоритет логической единицы и нуля на шине CAN. При одновременной передаче в шину лог. нуля и единицы, на шине будет зарегестрирован только логический ноль (доминантный сигнал), а логическая единица будет подавлена (рецессивный сигнал).
5 В). Использование такой дифференциальной схемы передачи делает возможным работу CAN сети в очень сложных внешних условиях. Логический ноль — называется доминантным битом, а логическая единица — рецессивным. Эти названия отражают приоритет логической единицы и нуля на шине CAN. При одновременной передаче в шину лог. нуля и единицы, на шине будет зарегестрирован только логический ноль (доминантный сигнал), а логическая единица будет подавлена (рецессивный сигнал).
Типы сообщений сети CAN.
Данные в CAN передаются короткими сообщениями-кадрами стандартного формата. В CAN существуют четыре типа сообщений:
- Data Frame
- Remote Frame
- Error Frame
- Overload Frame
Data Frame — это наиболее часто используемый тип сообщения. Он состоит из следующих основных частей:
- поле арбитража (arbitration field) определяет приоритет сообщения в случае, когда два или более узлов одновременно пытаются передать данные в сеть. Поле арбитража состоит в свою очередь из:
- для стандарта CAN-2.0A, 11-битного идентификатора + 1 бит RTR (retransmit)
- для стандарта CAN-2.0B, 29-битного идентификатора + 1 бит RTR (retransmit)
Следует отметить, что поле идентификатора, несмотря на свое название никак не идентифицирует само по себе ни узел в сети, ни содержимое поля данных. Для Data кадра бит RTR всегда выставлен в логический ноль (доминантный сигнал).
- поле данных (data field) содержит от 0 до 8 байт данных
- поле CRC (CRC field) содержит 15-битную контрольную сумму сообщения, которая используется для обнаружения ошибок
- слот подтверждения (Acknowledgement Slot) (1 бит), каждый CAN-контроллер, который правильно принял сообщение посылает бит подтверждения в сеть. Узел, который послал сообщение слушает этот бит, и в случае если подтверждение не пришло, повторяет передачу. В случае приема слота подтверждения передающий узел может быть уверен лишь в том, что хотя бы один из узлов в сети правльно принял его сообщение.
 Поле арбитража состоит в свою очередь из:
Поле арбитража состоит в свою очередь из: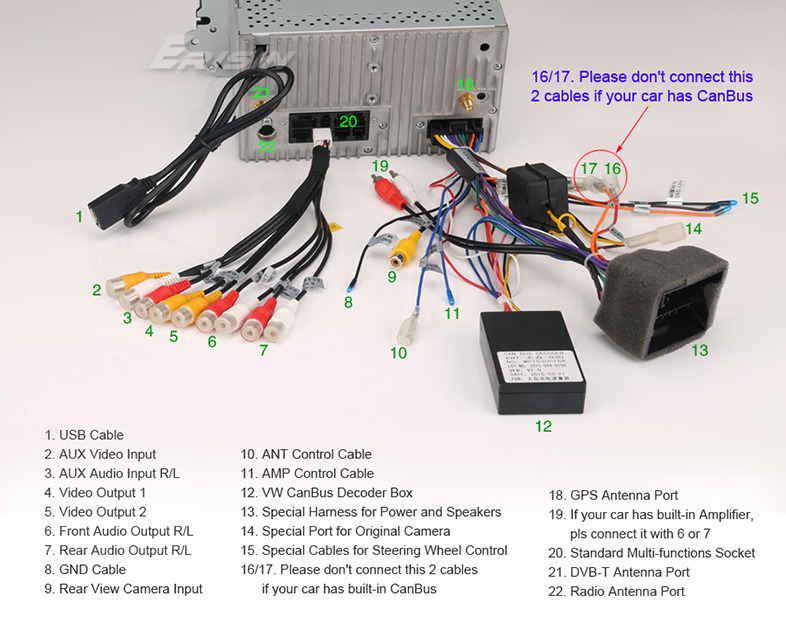
Remote Frame — это Data Frame без поля данных и с выставленным битом RTR (1 — рецессивные бит). Основное предназначение Remote кадра — это инициация одним из узлов сети передачи в сеть данных другим узлом. Такая схема позволяет уменьшить суммарный трафик сети. Однако, на практике Remote Frame сейчас используется редко (например, в DeviceNet Remote Frame вовсе не используется).
Error Frame — это сообщение которое явно нарушает формат солобщения CAN. Передача такого сообщения приводит к тому, что все узлы сети регистрируют ошибку формата CAN-кадра, и в свою очередь автоматически передают в сеть Error Frame. Результатом этого процесса является автоматическая повторная передача данных в сеть передающим узлом. Error Frame состоит из поля Error Flag, которое состоит из 6 бит одинакового значения (и таким образом Error frame нарушает проверку Bit Stuffing, см. ниже), и поля Error Delimiter, состоящее из 8 рецессивных битов.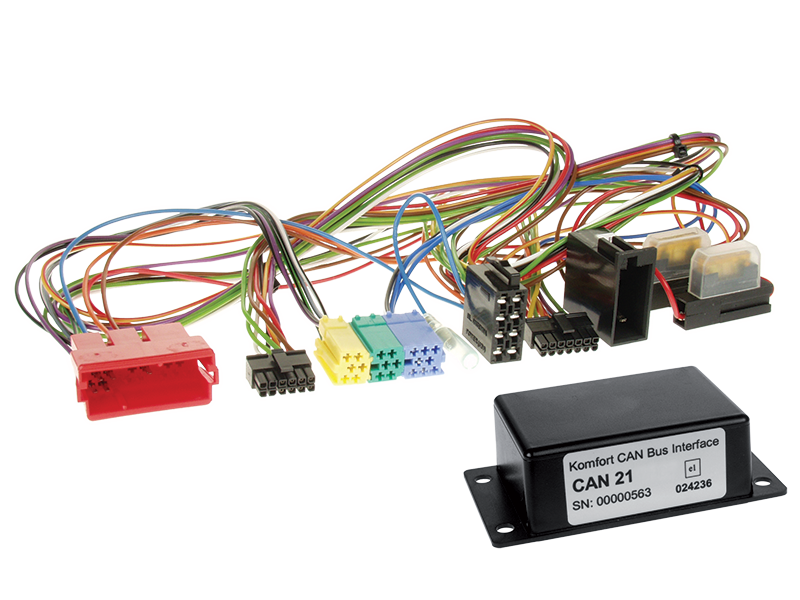 Error Delimiter дает возможность другим узлам сети обнаружив Error Frame послать в сеть свой Error Flag.
Error Delimiter дает возможность другим узлам сети обнаружив Error Frame послать в сеть свой Error Flag.
Overload Frame — повторяет структуру и логику работы Error кадра, с той разницей, что он используется перегруженным узлом, который в данный момент не может обработать поступающее сообщение, и поэтому просит при помощи Overload-кадра о повторной передаче данных. В настоящее время Overload-кадр практически не используется.
Контроль доступа к среде передачи (побитовый арбитраж).
Поле арбитража CAN-кадра используется в CAN для разрешения коллизий доступа к шине методом не деструктивного арбитража. Суть метода не деструктивного арбитража заключается в следующем. В случае, когда несколько контроллеров начинают одновременную передачу CAN кадра в сеть, каждый из них сравнивает, бит, который собирается передать на шину с битом, который пытается передать на шину конкурирующий контроллер. Если значения этих битов равны, оба контроллера передают следующий бит.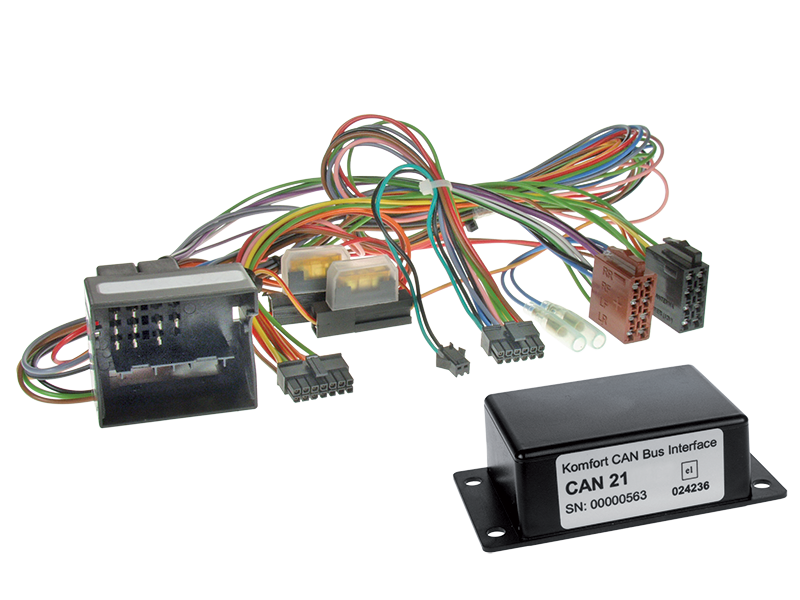 И так происходит до тех пор, пока значения передаваемых битов не окажутся различными. Теперь контроллер, который передавал логический ноль (более приоритетный сигнал) будет продолжать передачу, а другой (другие) контроллер прервёт свою передачу до того времени, пока шина вновь не освободится. Конечно, если шина в данный момент занята, то контроллер не начнет передачу до момента её освобождения.
И так происходит до тех пор, пока значения передаваемых битов не окажутся различными. Теперь контроллер, который передавал логический ноль (более приоритетный сигнал) будет продолжать передачу, а другой (другие) контроллер прервёт свою передачу до того времени, пока шина вновь не освободится. Конечно, если шина в данный момент занята, то контроллер не начнет передачу до момента её освобождения.
Методы обнаружения ошибок.
CAN протокол определяет пять способов обнаружения ошибок в сети:
- Bit monitoring
- Bit stuffing
- Frame check
- ACKnowledgement Check
- CRC Check
Bit monitoring — каждый узел во время передачи битов в сеть сравнивает значение передаваемого им бита со значением бита которое появляется на шине. Если эти значения не совпадают, то узел генерирует ошибку Bit Error. Естественно, что во время арбитража на шине (передача поля арбитража в шину) этот механизм проверки ошибок отключается.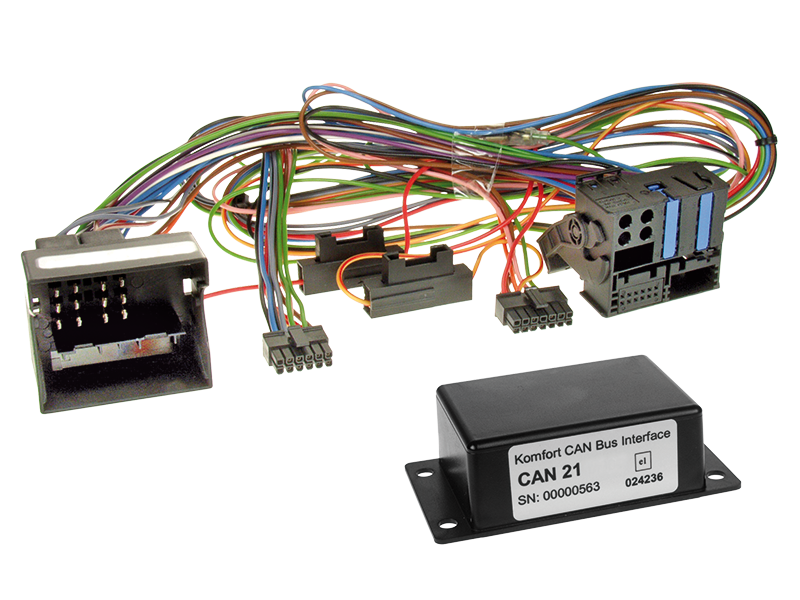
Bit stuffing — когда узел передает последовательно в шину 5 бит с одинаковым значением, то он добавляет шестой бит с противоположным значением. Принимающие узлы этот дополнительный бит удаляют. Если узел обнаруживает на шине больше 5 последовательных бит с одинаковым значением, то он генерирует ошибку Stuff Error.
Frame Check — некоторые части CAN-сообщения имеют одинаковое значение во всех типах сообщений. Т.е. протокол CAN точно определяет какие уровни напряжения и когда должны появляться на шине. Если формат сообщений нарушается, то узлы генерируют ошибку Form Error.
ACKnowledgement Check — каждый узел получив правильное сообщение по сети посылает в сеть доминантный (0) бит. Если же этого не происходит, то передающий узел регистрирует ошибку Acknowledgement Error.
CRC Check — каждое сообщение CAN содержит CRC сумму, и каждый принимающий узел подсчитывает значение CRC для каждого полученного сообщения.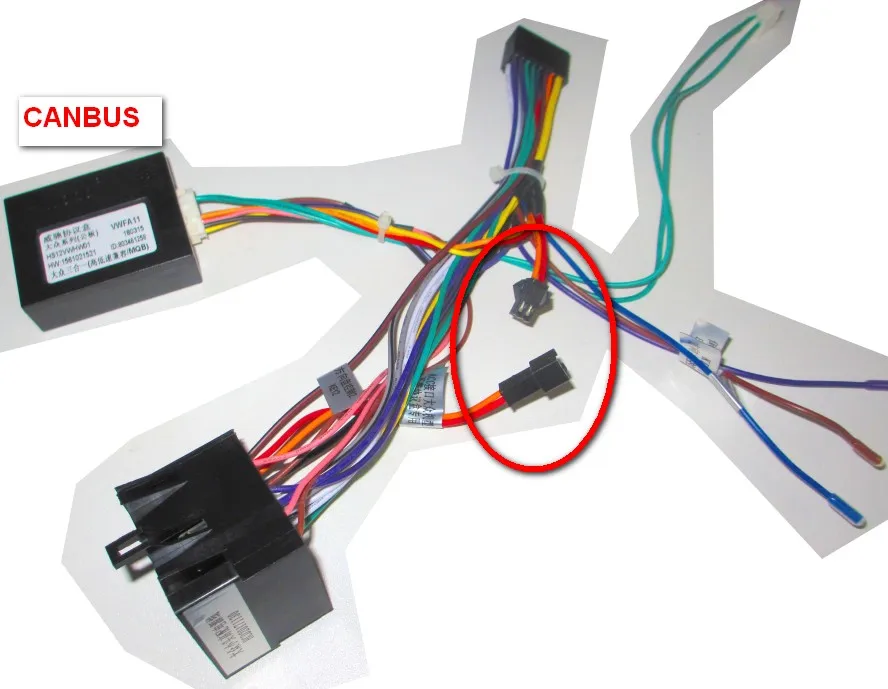 Если подсчитанное значение CRC суммы, не совпадает со значением CRC в теле сообщения, принимающий узел генерирует ошибку CRC Error.
Если подсчитанное значение CRC суммы, не совпадает со значением CRC в теле сообщения, принимающий узел генерирует ошибку CRC Error.
Механизм ограничения ошибок (Error confinement).
Каждый узел сети CAN, во время работы пытается обнаружить одну из пяти возможных ошибок. Если ошибка обнаружена, узел передает в сеть Error Frame, разрушая тем самым весь текущий трафик сети (передачу и прием текущего сообщения). Все остальные узлы обнаруживают Error Frame и принимают соответствующие действия (сбрасывают принятое сообщение). Кроме того, каждый узел ведет два счетчика ошибок: Transmit Error Counter (счетчик ошибок передачи) и Receive Error Counter (счетчик ошибок приема). Эти счетчики увеличиваются или уменьшаются в соответствие с несколькими правилами. Сами правила управления счетчиками ошибок достаточно сложны, но сводятся к простому принципу, ошибка передачи приводит к увеличению Transmit Error счетчика на 8, ошибка приема увеличивает счетчик Receive Error на 1, любая корректная передача/прием сообщения уменшают соответствующий счетчик на 1. Эти правила приводят к тому, что счетчик ошибок передачи передающего узла увеличивается быстрее, чем счетчик ошибок приема принимающих узлов. Это правило соответствует предположению о большой вероятности того, что источником ошибок является передающий узел.
Эти правила приводят к тому, что счетчик ошибок передачи передающего узла увеличивается быстрее, чем счетчик ошибок приема принимающих узлов. Это правило соответствует предположению о большой вероятности того, что источником ошибок является передающий узел.
Каждый узел CAN сети может находится в одном из трех состояний. Когда узел стартует он находится в состоянии Error Active. Когда, значение хотя бы одного из двух счетчиков ошибок превышает предел 127, узел переходит в состояние Error Passive. Когда значение хотя бы одного из двух счетчиков превышает предел 255, узел переходит в состояние Bus Off.
Узел находящийся в состоянии Error Active в случае обнаружения ошибки на шине передает в сеть Active Error Flags. Active Error Flags сотстоит из 6 доминантных бит, поэтому все узлы его регистрируют. Узел в состоянии Passive Error передает в сеть Passive Error Flags при обнаружении ошибки в сети. Passive Error Flags состоит из 6 рецессивных бит, поэтому остальные узлы сети его не замечают, и Passive Error Flags лишь приводит к увеличению Error счетчика узла. Узел в состоянии Bus Off ничего не передает в сеть (не только Error кадры, но вообще никакие другие).
Узел в состоянии Bus Off ничего не передает в сеть (не только Error кадры, но вообще никакие другие).
Адресация и протоколы высокого уровня
В CAN не существует явной адресации сообщений и узлов. Протокол CAN нигде не указывает что поле арбитража (Identification field + RTR) должно использоваться как идентификатор сообщения или узла. Таким образом, идентификаторы сообщений и адреса узлов могут находится в любом поле сообщения (в поле арбитража или в поле данных, или присутствовать и там, и там). Точно также протокол не запрещает использовать поле арбитража для передачи данных.
Утилизация поля арбитража и поля данных, и распределение адресов узлов, идентификаторов сообщений и приоритетов в сети является предметом рассмотрений так называемых протоколов высокого уровня (HLP — Higher Layer Protocols). Название HLP отражает тот факт, что протокол CAN описывает только два нижних уровня эталонной сетевой модели ISO/OSI, а остальные уровни описываются протоколами HLP.
Существует множество таких высокоуровневых протоколов. Наиболее распространенные из них это:
- DeviceNet
- CAL/CANopen
- SDS
- CanKingdom
Физичекий уровень протокола CAN
Физический уровень (Physical Layer) протокола CAN определяет сопротивление кабеля, уровень электрических сигналов в сети и т.п. Существует несколько физических уровней протокола CAN (ISO 11898, ISO 11519, SAE J2411).
В подавляющем большинстве случаев используется физический уровень CAN определенный в стандарте ISO 11898. ISO 11898 в качестве среды передачи определяет двухпроводную дифференциальную линию с импедансом (терминаторы) 120 Ом (допускается колебание импеданса в пределах от 108 Ом до 132 Ом. Физический уровень CAN реализован в специальных чипах — CAN приемо-передатчиках (transceivers), которые преобразуют обычные TTL уровни сигналов используемых CAN-контроллерами в уровни сигналов на шине CAN. Наиболее распространенный CAN приемо-передатчик — Phillips 82C250, который полностью соответствует стандарту ISO 11898.
Наиболее распространенный CAN приемо-передатчик — Phillips 82C250, который полностью соответствует стандарту ISO 11898.
Махимальная скорость сети CAN в соответствие с протоколом равна 1 Mbit/sec. При скорости в 1 Mbit/sec максимальная длина кабеля равна примерно 40 метрам. Ограничение на длину кабеля связано с конечной скоростью света и механизмом побитового арбитража (во время арбитража все узлы сети должны получать текущий бит передачи одновременно, те сигнал должен успеть распространится по всему кабелю за единичный отсчет времени в сети. Соотношение между скоростью передачи и максимальной длиной кабеля приведено в таблице:
| скорость передачи | максимальная длина сети |
| 1000 Кбит/сек | 40 метров |
| 500 Кбит/сек | 100 метров |
| 250 Кбит/сек | 200 метров |
| 125 Кбит/сек | 500 метров |
| 10 Кбит/сек | 6 километров |
Разъемы для сети CAN до сих пор НЕ СТАНДАРТИЗОВАНЫ. Каждый протокол высокого уровня обычно определяет свой тип разъемов для CAN-сети.
Каждый протокол высокого уровня обычно определяет свой тип разъемов для CAN-сети.
Шина CAN зачем и для чего нужна в машине | Автосервис АвтоРеал
CAN-Bus (шина контролируемой сети) — это система связи, которая позволяет различным электронным компонентам обмениваться данными и информацией друг с другом.
Современный автомобиль может иметь десятки электронных блоков управления (ЭБУ). Главный процессор компьютера отвечает за управление двигателем, другие модули управления используются для передачи данных между такими системами, как: подушки безопасности, противоугонные системы, тормозная система/система ABS, электроусилитель руля, аудиосистемы, управление окнами, дверями и лампами.
Система CAN-BUS позволяет всем этим компонентам связываться с главным компьютером автомобиля, может связываться друг с другом, управлять другими частями и получать обратную связь от датчиков.
Преимущество системы CAN-BUS заключается в уменьшении количества кабелей, что в случае растущего числа электронных компонентов экономически важно. Система CAN-BUS упрощает диагностику автомобильных компонентов с помощью компьютера, связь между датчиками компонентов также быстрее, чем при использовании традиционных электротехнических решений.
Система CAN-BUS упрощает диагностику автомобильных компонентов с помощью компьютера, связь между датчиками компонентов также быстрее, чем при использовании традиционных электротехнических решений.
Операционные системы CAN-BUS распространены в новых автомобилях. Во многих моделях они имеют упрощенное управление на основе системы CAN-BUS с середины 2000 года. Эта система используется основными производителями автомобилей, такими как Audi, BMW, Nissan, Honda и Toyota.
Если вы устанавливаете новую фару или светодиодную лампу без системы CAN BUS, автомобильный компьютер выдаст ошибку, лампочка будет мигать или будет отключена.
В дополнение к своим преимуществам, система CAN BUS также имеет недостатки. Адаптация компонентов, не полученная в результате официального распространения производителя автомобилей, может быть трудоемкой. требовать специального оборудования и знаний. Это также часто относится к ксеноновым лампам и горелкам. Производитель может легко предотвратить использование более дешевых заменителей.
В случае автомобильных светодиодных ламп возможны решения: светодиодные лампы адаптированы к системе CAN-BUS или внешние фильтры. Оба решения имеют свои плюсы и минусы. Выбор решения зависит от использования лампы.
Светодиодные лампы, адаптированные к системе CANBUS, представляют собой простое и удобное решение. Светодиодная лампа монтируется как традиционная лампа. Из-за того, что светодиодная лампа CANBUS потребляет больше тока, чем обычная, компьютер автомобиля «видит» ее как обычную лампу. Старые модели светодиодных ламп, адаптированные к системе CAN BUS, просто имели встроенный резистор, увеличивающий потребление энергии лампой. Простое и дешевое решение, но недостатком является увеличение количества выделяемого тепла. В случае дешевых ламп на основе неадаптированных компонентов это приводит к быстрому повреждению колбы. Такое решение возможно только для светодиодных ламп с низким энергопотреблением, например, для внутреннего освещения, освещения номерного знака, парковок. Использование этого решения в лампах повышенной мощности поднимает проблему с отводом тепла. Более новые решения имеют электронную систему,
Использование этого решения в лампах повышенной мощности поднимает проблему с отводом тепла. Более новые решения имеют электронную систему,
Внешние фильтры. Светодиодные декодеры CANBUS
Выбор фильтра светодиодного CANBUS-декодера зависит от марки автомобиля, способа питания лампы и типа возникающих ошибок. Это довольно сложный вопрос, кстати, как технику и производителю, он может усложнить замену лампочки в автомобиле. Но давайте попробуем представить основные проблемы и способы их решения.
Светодиодные декодеры CANBUS
Когда вам нужен светодиодный декодер?
После установки отражателя или светодиодной лампы возникают следующие симптомы:
- Когда свет включен, фара или светодиодная лампа мигает.
- Компьютер показывает ошибку фар или лампочки.
- Фара или светодиодная лампа остаются включены на некоторое время, несмотря на выключение питания.
- Яркость фары или светодиодной лампы уменьшается, чем при непосредственном подключении к источнику питания, например батарее.

Каковы функции светодиодного декодера CAN BUS?
Для автомобилей, произведенных в Германии, например, Audi, BMW, Skoda, Mercedes система CANBUS включается при запуске двигателя. Зачастую проблемы не замечаются после установки, питания от аккумулятора и появляются после запуска двигателя. В этом случае электронный светодиодный декодер необходим для связи с основным автомобильным компьютером в отношении состояния лампочек. Некоторые немецкие системы CANBUS также проверяют мощность, потребляемую лампами. В случае более низкого энергопотребления светодиодных ламп может потребоваться использование фильтра на основе резистора, который увеличивает потребление тока светодиодной лампой до размера, приемлемого для компьютера.
Каковы функции светодиодного декодера CAN BUS
Импульсный источник питания для лампочек
Некоторые производители автомобилей, в основном немецкие, используют импульсные источники питания для лампочек. Эта технология используется для уменьшения количества тепла, выделяемого галогенными лампами, для увеличения срока их службы и контроля их состояния с помощью системы CANBUS. В этом случае лампы питаются от напряжения, модулированного компьютером автомобиля. Напряжение отключается примерно на 2 мс, что не влияет из-за тепловой инерции на видимость света от галогенной лампы. Светодиодные лампы могут мигать, а затем выключаться. В этом случае необходимо установить дополнительный светодиодный декодер.
В этом случае лампы питаются от напряжения, модулированного компьютером автомобиля. Напряжение отключается примерно на 2 мс, что не влияет из-за тепловой инерции на видимость света от галогенной лампы. Светодиодные лампы могут мигать, а затем выключаться. В этом случае необходимо установить дополнительный светодиодный декодер.
: основы работы
Система шины CAN — это не то, о чем вы слышите ежедневно, но это одна из самых важных частей любого современного автомобиля. Проще говоря, этот электронный коммутатор — это то, что поддерживает связь всех систем вашего автомобиля друг с другом, чтобы ваш автомобиль или грузовик продолжали работать в отличной форме.
Как работает эта автомобильная магия? Прочтите основы работы с шиной CAN.
Сеть, автомобильный стиль Шина CAN не только встречается в мире автомобилей — это фактически стандартная шина (сеть контроллеров), которую можно найти в различных приложениях.«Шина» — это термин, относящийся к любой системе связи, которая может перемещать данные между одним компонентом и другим. Шина CAN впервые появилась в 80-х годах, но только в начале 90-х в транспортных средствах появилось достаточно контроллеров, датчиков и микропроцессоров, чтобы потребовалась выделенная шина для обработки всего трафика данных. Переход на шину CAN также позволил автомобильным компаниям сократить количество проводов от каждого автомобиля, поскольку система упростила методы электронного управления, которые использовались до этого момента.
Шина CAN впервые появилась в 80-х годах, но только в начале 90-х в транспортных средствах появилось достаточно контроллеров, датчиков и микропроцессоров, чтобы потребовалась выделенная шина для обработки всего трафика данных. Переход на шину CAN также позволил автомобильным компаниям сократить количество проводов от каждого автомобиля, поскольку система упростила методы электронного управления, которые использовались до этого момента.
Система шины CAN состоит из первичного контроллера, который контролирует все системы автомобиля из центрального пункта. Это упрощает отслеживание неисправностей, а затем диагностику конкретных проблем, вместо того, чтобы вручную опрашивать многочисленные субконтроллеры, распределенные по автомобилю или грузовику. Это также снижает количество точек отказа: благодаря единой линии передачи данных, обрабатывающей все коммуникации, нет необходимости беспокоиться о том, что несколько соединений могут выйти из строя и вызвать проблемы. Кроме того, конструкция позволяет основной системе продолжать работать даже в случае отказа подсистемы, что является уровнем избыточности, которого было труднее достичь при использовании дискретных контроллеров.
Кроме того, конструкция позволяет основной системе продолжать работать даже в случае отказа подсистемы, что является уровнем избыточности, которого было труднее достичь при использовании дискретных контроллеров.
Внедрение CAN-шины позволило автомобильным компаниям продвинуться вперед с протоколами бортовой диагностики, известными как OBD-I и текущим стандартом OBD-II. OBD-II предлагает набор стандартизированных кодов проблем, которые могут быть легко интерпретированы механиками и даже владельцами при попытке диагностировать проблему.Порт данных, через который осуществляется доступ к кодам OBD-II, также служит точкой входа для обновлений программного обеспечения бортовых систем и компьютеров автомобиля — что было бы невозможно, и для чего потребовалась бы физическая замена компьютерных чипов до наличие системы CAN-шины.
Ознакомьтесь со всеми продуктами для электрооборудования и системы зажигания  Чтобы получить дополнительную информацию о системе CAN-шины и вашем автомобиле, поговорите со знающим экспертом в местном магазине NAPA AUTO PARTS.
Чтобы получить дополнительную информацию о системе CAN-шины и вашем автомобиле, поговорите со знающим экспертом в местном магазине NAPA AUTO PARTS.
Фото любезно предоставлено Wikimedia Commons.
| |
 По мере развития технологий автомобили становились все более сложными, поскольку электронные компоненты заменяли механические системы и обеспечивали дополнительные удобства, удобства и безопасность.Вплоть до выпуска CAN-шины автомобили содержали огромное количество проводов, необходимых для соединения всех различных электронных компонентов.
По мере развития технологий автомобили становились все более сложными, поскольку электронные компоненты заменяли механические системы и обеспечивали дополнительные удобства, удобства и безопасность.Вплоть до выпуска CAN-шины автомобили содержали огромное количество проводов, необходимых для соединения всех различных электронных компонентов. В ходе этого прогресса монтажным мастерским становилось все труднее находить квалифицированный персонал, способный выполнять повседневные работы, и в результате им приходилось либо повышать свои цены, чтобы компенсировать требуемую специализацию и рабочую силу, либо просто отказываться от клиенты, владевшие сложными автомобилями.
В ходе этого прогресса монтажным мастерским становилось все труднее находить квалифицированный персонал, способный выполнять повседневные работы, и в результате им приходилось либо повышать свои цены, чтобы компенсировать требуемую специализацию и рабочую силу, либо просто отказываться от клиенты, владевшие сложными автомобилями.
Что такое CAN-шина в автомобиле и зачем вам уход
Современные автомобили состоят из ряда различных компьютерных компонентов, называемых электронными блоками управления (ЭБУ). Типичный автомобиль содержит от 20 до 100 ЭБУ, каждый из которых отвечает за одну или несколько особенностей автомобиля. Например, DCU (Door Control Unit) — это ЭБУ, который контролирует и контролирует различные аксессуары в двери автомобиля.Driver DCU предлагает такие функции, как автоматическое движение окон, закрытие дверей, складывание зеркал, защита от детей и регулировка зеркал.
CAN-шина — это набор из 2 электрических проводов (CAN_Low и CAN_High) в автомобильной сети, по которым информация может быть отправлена на ЭБУ и от них. Сеть внутри автомобиля, которая позволяет блокам управления двигателем взаимодействовать друг с другом, называется CAN (Controller Area Network). В Evoque сеть CAN разделена на подсети, соединенные вместе с помощью ЭБУ модуля шлюза. Каждый ЭБУ с его контроллером CAN и трансивером CAN называется узлом.
В Evoque сеть CAN разделена на подсети, соединенные вместе с помощью ЭБУ модуля шлюза. Каждый ЭБУ с его контроллером CAN и трансивером CAN называется узлом.
ЭБУ должны передавать данные друг другу, чтобы они могли принимать решения о том, как действовать. Например, если вы открываете дверь своего автомобиля, по шине Comfort CAN будет отправлено сообщение о том, что дверь автомобиля открыта.Затем он будет улавливаться ЭБУ AHU-Audio System и отображаться на сенсорном экране. Другой пример, если нужно было выбрать передачу заднего хода:
- По шине CAN будет отправлено сообщение, чтобы сообщить любому заинтересованному ЭБУ, что выбрана передача заднего хода.
- Сообщение будет получено ЭБУ AHU-Audio, что заставит камеру заднего вида отображаться на сенсорном экране, игнорируя текущую отображаемую информацию.
- Сообщение также будет получено ЭБУ, который управляет фарами заднего хода, чтобы включить их.

Некоторые ЭБУ обмениваются данными с внешним миром, а также с внутренней сетью автомобиля. Эти ЭБУ представляют наибольшую угрозу безопасности. Я посвящу часть II этой статьи обсуждению рисков безопасности, а также средствам управления для снижения этих рисков.
Блок управления, который мы подробно рассмотрим в этой статье, — это блок управления аудиосистемой (головное аудиосистема) AHU.Это ЭБУ, к которому подключен сенсорный экран Evoque.
Блок управления аудиосистемой AHU
Блок управления аудиосистемой AHU-Audio в этой версии Evoque производится компанией Harman Automotive (https://www.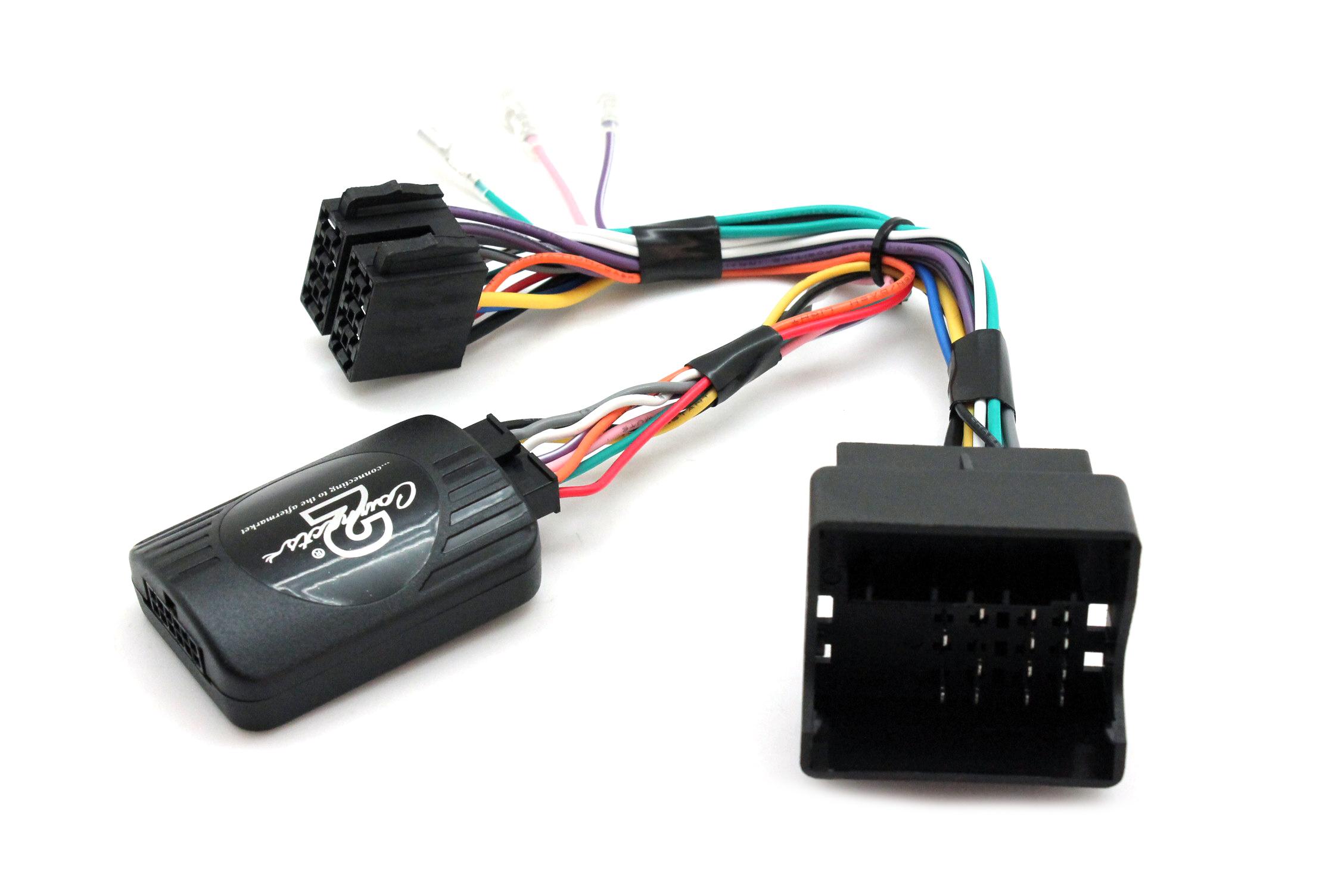 harman.com). Головное аудиоустройство (AHU) находится под передним правым сиденьем (для правого руля — под сиденьем водителя).
harman.com). Головное аудиоустройство (AHU) находится под передним правым сиденьем (для правого руля — под сиденьем водителя).
ЭБУ AHU-Audio System имеет следующие особенности:
| Встроенный (внутри AHU) 4-канальный модуль аудиоусилителя (AAM) | |
| AM / FM-радио | |
| Входы для внешнего медиаплеера (USB и дополнительный порт) | |
| Связь по Bluetooth | |
| Навигационная система с обновлениями карт памяти Secure Digital (SD) | |
| Распознавание голоса |
ЭБУ AHU-Audio имеет 40-контактный разъем Quadlock, подключенный к нескольким компонентам внутри автомобиля, включая динамики, микрофон, системную шину CAN Comfort, органы управления на рулевом колесе, питание и заземление.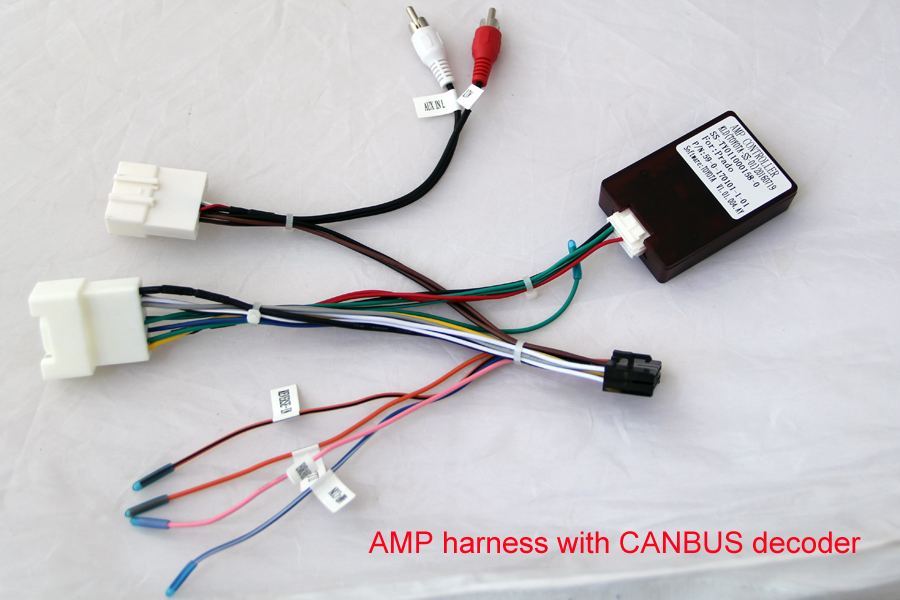
Аудиосигналы, исходящие от AHU (радио, музыка, навигация, телефон и т. Д.), Передаются на динамики автомобиля через проводные соединения (40-контактный разъем согласно приведенной выше схеме). Звуковые сигналы, генерируемые другими системами автомобиля (например, противоугонная сигнализация, оповещения о датчиках парковки), передаются в AHU по шине систем комфорта средней скорости (MS) сети контроллеров (CAN). AHU обрабатывает сигналы и передает аудиовыход на динамики.
Evoque Сенсорный экран
На сенсорном экране есть несколько переключателей, которые управляют несколькими функциями. Все действия переключателей (вкл. / Выкл.) Передаются в ЭБУ аудиосистемы AHU-Audio, за исключением выключателя системы помощи при парковке, который передается непосредственно в модуль управления системой помощи при парковке (ЭБУ системы помощи при парковке) для активации / деактивации датчиков парковки.
Хотя эта конкретная модель автомобиля не является подключенной, она может стать подключенной, если вы установите новое головное устройство, способное подключаться к Интернету. Вы можете посмотреть мою статью здесь, в которой подробно рассказывается, как превратить ваш автомобиль, не подключенный к сети, в подключенный.
Протокол сети контроллеров (CAN BUS)
Каждый CAN-контроллер на шине будет пытаться обнаружить ошибки, описанные выше, в каждом сообщении.Если обнаружена ошибка, обнаруживающий узел передает флаг ошибки, тем самым разрушая трафик шины. Другие узлы обнаружат ошибку, вызванную флагом ошибки (если они еще не обнаружили исходную ошибку), и предпримут соответствующие действия, то есть отклонят текущее сообщение.
Каждый узел поддерживает два счетчика ошибок: счетчик ошибок передачи и счетчик ошибок приема. Существует несколько правил, регулирующих увеличение и / или уменьшение этих счетчиков. По сути, передатчик, обнаруживающий ошибку, увеличивает свой счетчик ошибок передачи быстрее, чем узлы прослушивания увеличивают свой счетчик ошибок приема.Это потому, что велика вероятность того, что виноват передатчик!
По сути, передатчик, обнаруживающий ошибку, увеличивает свой счетчик ошибок передачи быстрее, чем узлы прослушивания увеличивают свой счетчик ошибок приема.Это потому, что велика вероятность того, что виноват передатчик!
Узел запускается в активном режиме ошибки. Когда один из двух счетчиков ошибок поднимается выше 127, узел переходит в состояние, известное как пассивная ошибка, а когда счетчик ошибок передачи превысит 255, узел перейдет в состояние отключения шины.
- Узел «Активная ошибка» передает флаги активных ошибок при обнаружении ошибок.
- Узел «Пассивная ошибка» будет передавать флаги пассивной ошибки при обнаружении ошибок.
- Узел, который отключен от шины, вообще ничего не передает по шине.
Правила увеличения и уменьшения счетчиков ошибок несколько сложны, но принцип прост: ошибки передачи дают 8 баллов ошибок, а ошибки приема дают 1 балл ошибок. Правильно переданные и / или принятые сообщения приводят к уменьшению счетчика (ов).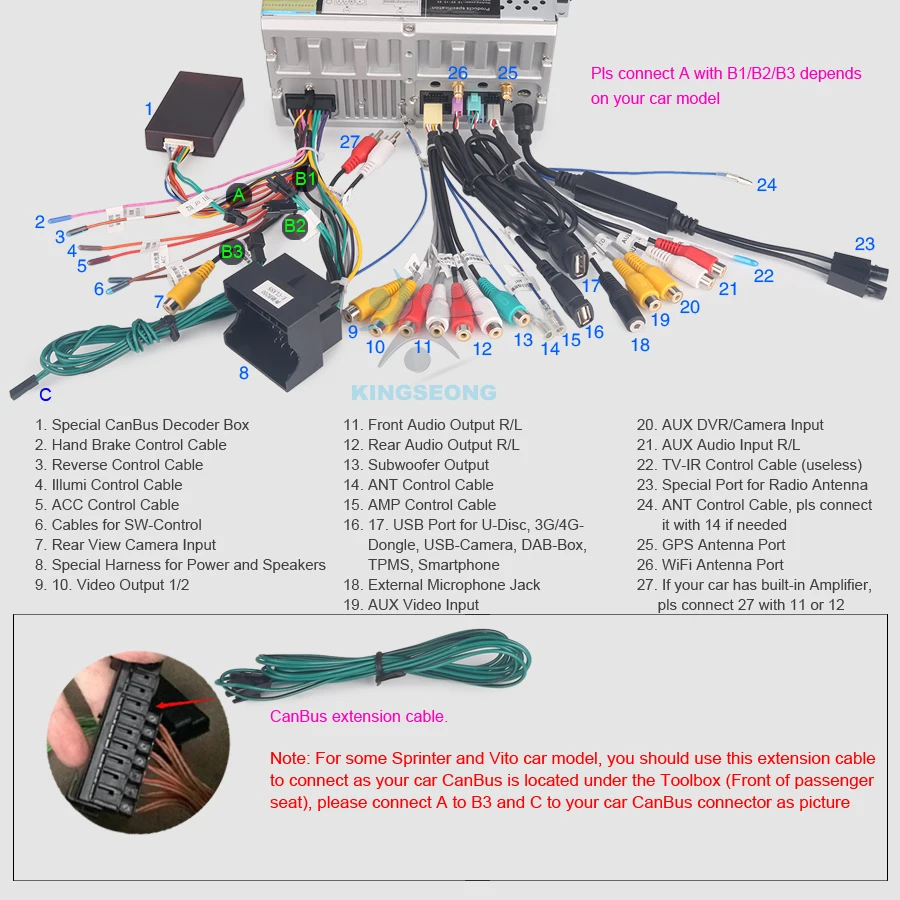
Пример (немного упрощенный): предположим, что у узла A на шине плохой день. Всякий раз, когда A пытается передать сообщение, он терпит неудачу (по любой причине).Каждый раз, когда это происходит, он увеличивает свой счетчик ошибок передачи на 8 и передает флаг активной ошибки. Затем он попытается повторно передать сообщение … и произойдет то же самое.
Когда значение счетчика ошибок передачи превышает 127 (т.е. после 16 попыток), узел A переходит в состояние пассивной ошибки. Разница в том, что теперь он будет передавать по шине флаги пассивной ошибки. Флаг пассивной ошибки состоит из 6 рецессивных битов и не уничтожает другой трафик шины, поэтому другие узлы не услышат жалобу A на ошибки шины.Однако A продолжает увеличивать свой счетчик ошибок передачи. Когда он поднимается выше 255, узел A наконец сдается и отключается от шины.
Что другие узлы думают об узле A? — Для каждого активного флага ошибки, переданного A, другие узлы увеличивают свои счетчики ошибок приема на 1. К тому времени, когда A переходит в состояние отключения шины, другие узлы будут иметь счет в своих счетчиках ошибок приема, который значительно ниже предела для Пассивная ошибка, то есть 127. Это количество будет уменьшаться на единицу для каждого правильно полученного сообщения.Однако узел A останется отключенным от шины.
К тому времени, когда A переходит в состояние отключения шины, другие узлы будут иметь счет в своих счетчиках ошибок приема, который значительно ниже предела для Пассивная ошибка, то есть 127. Это количество будет уменьшаться на единицу для каждого правильно полученного сообщения.Однако узел A останется отключенным от шины.
Большинство контроллеров CAN предоставляют биты состояния (и соответствующие прерывания) для двух состояний:
- «Предупреждение об ошибке» — один или оба счетчика ошибок выше 96
- Bus Off, как описано выше.
Некоторые — но не все! — контроллеры также предоставляют бит для состояния пассивной ошибки. Некоторые контроллеры также предоставляют прямой доступ к счетчикам ошибок.
Привычка контроллера CAN автоматически повторно передавать сообщения при возникновении ошибок временами может раздражать.На рынке есть по крайней мере один контроллер (SJA1000 от Philips), который позволяет полностью вручную управлять обработкой ошибок.
CAN BUS (СЕТЬ КОНТРОЛЛЕРА)
Общее описание
CAN-шина — это автомобильная шина, разработанная Bosch, позволяющая микроконтроллерам и устройствам связываться друг с другом в автомобиле без главного компьютера. CAN-шина — это протокол на основе сообщений, разработанный специально для автомобильных приложений, но теперь он также используется в других областях, таких как аэрокосмическая промышленность, промышленная автоматизация и медицинское оборудование.В 1994 году он стал международным стандартом (ISO 11898) и был специально разработан для быстрого последовательного обмена данными между электронными контроллерами в автомобилях. Он соединяет отдельные системы и датчики в качестве альтернативы обычным многопроволочным ткацким станкам. Он позволяет автомобильным компонентам обмениваться данными по однопроводной или двухпроводной сетевой шине данных со скоростью до 1 Мбит / с. CAN-шина
— это один из пяти протоколов, используемых в стандарте диагностики автомобилей OBD-II.
Внешний вид
Фиг.1 Автомобильная сеть CAN BUS
Принцип работы CAN BUS
В шине CAN для связи используются два выделенных провода. Эти провода называются CAN high и CAN low. Контроллер CAN подключается ко всем компонентам сети через эти два провода. Каждый сетевой узел имеет уникальный идентификатор. Все ЭБУ на шине работают параллельно, поэтому все узлы видят все данные все время. Узел отвечает только тогда, когда он обнаруживает свой собственный идентификатор.Отдельные узлы могут быть удалены из сети, не затрагивая другие узлы.
Когда шина CAN находится в режиме ожидания, по обеим линиям подается 2,5 В. Когда передаются биты данных, линия CAN высокого уровня достигает 3,75 В, а низкий уровень CAN падает до 1,25 В, тем самым создавая разность 2,5 В между линиями: каждая из линий CAN связана с другой, а не с землей автомобиля. . Поскольку связь основана на разности напряжений между двумя линиями шины, шина CAN НЕ чувствительна к индуктивным выбросам, электрическим полям или другим помехам. Это делает CAN-шину надежным выбором для сетевой связи на мобильном оборудовании.
Это делает CAN-шину надежным выбором для сетевой связи на мобильном оборудовании.
Рис.2
Питание CAN может подаваться через шину CAN. Либо можно организовать питание модулей шины CAN отдельно. Электропроводка источника питания может быть либо полностью отделена от линий шины CAN, в результате чего для сети используются два 2-проводных кабеля, либо она может быть интегрирована в тот же кабель, что и линии шины CAN, в результате чего получается один 4-проводный кабель.
Характер связи по шине CAN позволяет всем модулям передавать и получать данные по шине.Любой модуль может передавать данные, которые получают все остальные модули. Очень важно, чтобы полоса пропускания CAN-шины была выделена в первую очередь наиболее критичным для безопасности системам. Узлам обычно назначается один из нескольких уровней приоритета. Например, органы управления двигателем, тормозами и подушками безопасности очень важны с точки зрения безопасности, и командам на активацию этих систем отдается высший приоритет. Это означает, что они будут задействованы раньше, чем менее важные. Аудио и навигационные устройства часто имеют средний приоритет, а активация освещения может иметь самый низкий приоритет.Процесс, известный как арбитраж, определяет приоритет любых сообщений.
Это означает, что они будут задействованы раньше, чем менее важные. Аудио и навигационные устройства часто имеют средний приоритет, а активация освещения может иметь самый низкий приоритет.Процесс, известный как арбитраж, определяет приоритет любых сообщений.
Большинство автомобильных сетей CAN работают со скоростью шины 250 кБ / с или 500 кБ / с. В новейших автомобилях используется до 3 отдельных сетей CAN, обычно разной скорости, соединенных между собой шлюзами. Данные одной из трех сетей доступны двум другим сетям. Функции управления двигателем обычно выполняются на высокоскоростной шине со скоростью 500 кбит / с, а системы шасси работают на более медленной шине CAN со скоростью 250 кбит / с. Другие функции, такие как освещение, спутниковая навигация и зеркала, находятся на отдельной низкоскоростной однопроводной шине LIN (Local Interconnect Network).
Процедура проверки надежности CAN-шины с помощью осциллографа
- Определите контакты CAN-H и CAN-L в доступной точке сети CAN.
Такой точкой обычно является многоходовой разъем ЭБУ. - Установите входы осциллографа на 5 В
- Подключите измерительный провод сигнала одного из каналов осциллографа к проводу CAN-H.
Затем подключите заземляющий провод к заземлению корпуса.
Подключите измерительный провод сигнала одного из других каналов осциллографа к проводу CAN-L. - Включите зажигание.
- Посмотрите на экран осциллографа. Вы должны наблюдать следующие формы сигналов.

Измерение позволяет выполнить следующие проверки:
• Проверить правильность размахов напряжения
• Проверить, присутствует ли сигнал на обоих проводах CAN (CAN использует дифференциальную сигнализацию, поэтому сигнал на одной линии должен быть зеркальным изображение данных на другой строке).
Фиг.3
Возможное r случаев отказа в сети CAN BUS :
• Неправильный размах напряжения.
• Сигнал на обоих проводах CAN отсутствует.
Стандарт ISO 11898 перечисляет несколько видов отказа кабеля CAN-шины:
- CAN_H прерван
- CAN_L прерван
- CAN_H замкнут на напряжение аккумулятора
- CAN_L замкнут на массу
- CAN_H замкнут на массу
- CAN_L замкнут на напряжение аккумулятора
- CAN_L замкнут на провод CAN_H
- CAN_H и CAN_L прерваны в одном месте
- Потеря связи с оконечной сетью
Протокол шины CAN — 10-минутный урок
Введение в шину CAN: CAN (сеть контроллеров) — это двухпроводной протокол дифференциальной последовательной связи, используемый для управления в реальном времени.Протокол шины CAN был первоначально разработан для автомобильной промышленности — для подключения трансмиссии, подушек безопасности, антиблокировочной системы тормозов / ABS, круиз-контроля, электроусилителя руля, аудиосистем, электрических стеклоподъемников, дверей, регулировки зеркал, аккумулятора и систем подзарядки для гибридных автомобилей.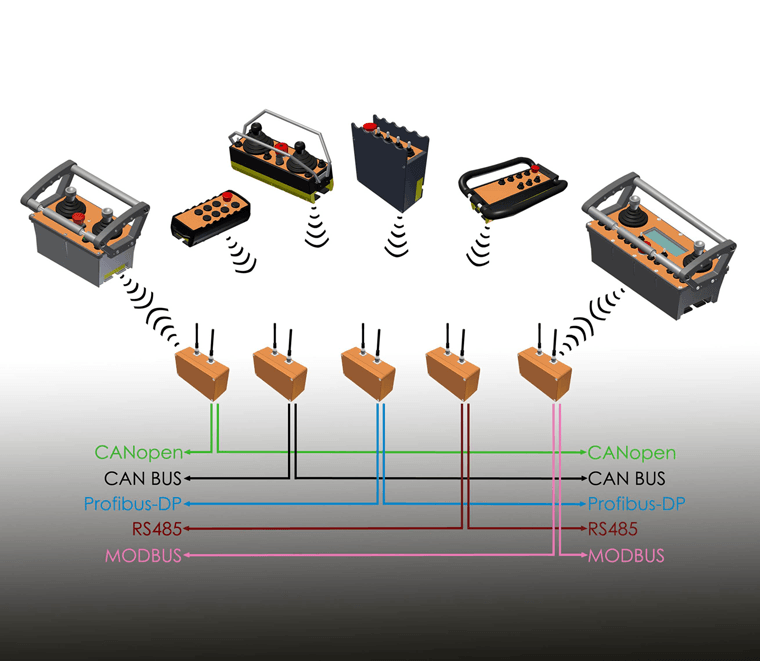 / электромобили и др.
/ электромобили и др.
CAN — это система рассылки сообщений с несколькими ведущими (одноранговая сеть), которая определяет максимальную скорость передачи сигналов от 125 кбит / с до 1 Мбит / с. Он предусматривает 2048 различных идентификаторов сообщений.
CAN был разработан Robert Bosch GmbH в 1983 году. CAN-шина является одним из пяти протоколов, используемых в стандарте бортовой диагностики (OBD) -II. Ежегодно продается около 1 миллиарда CAN-узлов.
Конкурентные преимущества и применениеПреимущества:
- Низкая стоимость : ЭБУ (ECU = Electronic Control Units) обмениваются данными через единственный интерфейс CAN, то есть не по прямым линиям аналоговых сигналов, что снижает количество ошибок, веса и затрат.
- Централизованный : Система шины CAN позволяет централизованно выполнять диагностику ошибок и конфигурировать все ЭБУ.
- Надежность : Система устойчива к отказам подсистем и электромагнитным помехам.
- Efficient : сообщения CAN имеют приоритет через идентификаторы, так что идентификаторы наивысшего приоритета не прерываются.
- Гибкий : Каждый ЭБУ содержит микросхему для приема всех передаваемых сообщений, определения актуальности и соответствующих действий — это позволяет легко модифицировать и включать дополнительные узлы
Рис.1: Пример CAN и без CAN в автомобильном приложении
CAN Bus широко используется в:
- Транспортные системы (железнодорожные, авиационные, морские и т. Д.)
- Системы управления промышленными машинами
- Автоматизация дома и зданий (например, HVAC, лифты)
- Машины мобильные (строительная и с / х техника)
- Медицинские устройства и лабораторная автоматизация, а также во многих других встроенных и глубоко встроенных приложениях.
Рис.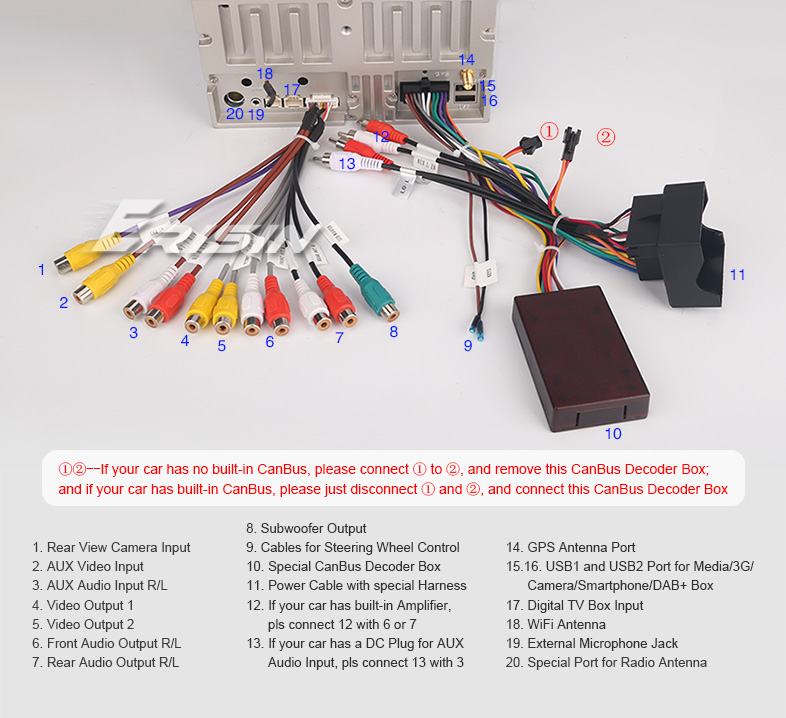 2: CAN BUS Архитектура OSI
2: CAN BUS Архитектура OSI
Высокая скорость CAN (CAN 2.0B)
- Скорость: до 1 Мбит / с
- Дальность: 40 м
- 29-битный идентификатор сообщения
- Оконечная нагрузка с резистором 120 Ом
Низкая скорость CAN (CAN 2.0A)
- Скорость: до 125 Кбит / с
- Дальность: 500 м
- 11-битный идентификатор сообщения
- общее оконечное сопротивление должно быть около 100 Ом.
CAN FD (гибкая скорость передачи данных)
- Скорость: до 15 Мбит / с
- Дальность 10м
Рис.3: Схема подключения DB9 CAN BUS Notwork
CAN синхронный или асинхронный?
При передаче данных CAN используется метод побитового арбитража без потерь для разрешения конфликтов. Этот метод арбитража требует, чтобы все узлы в сети CAN были синхронизированы для одновременной выборки каждого бита в сети CAN. Поэтому некоторые называют CAN синхронным. (К сожалению, термин «синхронный» неточен, поскольку данные передаются без тактового сигнала в асинхронном формате). Все узлы связаны друг с другом через двухпроводную шину.Провода представляют собой витую пару с характеристическим сопротивлением 120 Ом (номинальное).
Поэтому некоторые называют CAN синхронным. (К сожалению, термин «синхронный» неточен, поскольку данные передаются без тактового сигнала в асинхронном формате). Все узлы связаны друг с другом через двухпроводную шину.Провода представляют собой витую пару с характеристическим сопротивлением 120 Ом (номинальное).
ПРИМЕЧАНИЕ: CAN-шина должна быть терминирована. Согласующие резисторы необходимы для подавления отражений, а также для возврата шины в рецессивное состояние или состояние ожидания.
Рис.4: Топология шины CAN
CAN позволяет использовать несколько устройств (называемых «узлами»), для связи в сети CAN требуются два или более узла. Сложность узла может варьироваться от простого устройства ввода-вывода до встроенного компьютера или шлюза.Каждому узлу требуется: Центральный процессор: микропроцессор или хост-процессор. Контроллер CAN: часто является неотъемлемой частью микроконтроллера. Приемопередатчик CAN: определяется стандартами ISO 11898-2 / 3 Medium Access Unit [MAU].
Сколько узлов у вас может быть?
В CANopen уникальные адреса доступны для 127 узлов на шине. Однако практический физический предел количества узлов составляет около 110 единиц на шину. В J1939 для шины доступно 253 уникальных адреса.
Рис.5: CAN NODE
В спецификациях CAN используются термины «доминантные» биты и «рецессивные» биты. Доминантный — это логический 0 (передатчик активно управляет напряжением) Рецессивный — это логическая 1 (пассивно возвращается к напряжению резистором) Состояние ожидания представлено рецессивным уровнем (Логическая 1) другой узел передает рецессивный бит, тогда возникает коллизия, и доминирующий бит «выигрывает».«Сообщение» — это пакет данных, который несет информацию, подлежащую обмену между узлами. Каждое сообщение в CAN имеет уникальный идентификационный номер.
Следующее видео подробно объясняет, как работает CAN-шина:
 youtube.com/embed/YvsGuK9Up0E» frameborder=»0″ allow=»autoplay; encrypted-media» allowfullscreen=»»/>
youtube.com/embed/YvsGuK9Up0E» frameborder=»0″ allow=»autoplay; encrypted-media» allowfullscreen=»»/>
С протоколом, основанным на сообщениях, другие узлы могут быть добавлены без перепрограммирования, поскольку блоки, подключенные к шине, не имеют идентифицирующей информации, такой как адресация узлов. Таким образом, не требуется никаких изменений в программном и аппаратном обеспечении любого из устройств, подключенных к шине.Арбитраж — это процесс согласования между устройствами, в ходе которого решается, какое из них может взять на себя управление шиной (Рекомендуемое чтение: https://www.linkedin.com/pulse/bus-arbitration-can-controller-area-network- abdul-rehman-anwer / и https://www.mikroe.com/blog/can-bus).
Чтобы обеспечить достаточное количество переходов для поддержания синхронизации, бит противоположной полярности вставляется после пяти последовательных битов одной полярности. Эта практика называется вставкой битов и необходима из-за кодирования без возврата к нулю (NRZ), используемого с CAN. Заполненные кадры данных уничтожаются получателем.
Заполненные кадры данных уничтожаются получателем.
5 преимуществ протокола шины CAN
Что такое протокол CAN-шины?Протокол шины CAN (Controller Area Network, CAN) быстро набирает популярность среди инженеров, работающих с промышленными встроенными системами высокого уровня. Протокол был разработан Robert Bosch GmbH в 1986 году, чтобы способствовать дальнейшему развитию электронных коммуникаций в автомобильной промышленности.
В начале 1980-х производители транспортных средств впервые начали встраивать в легковые и грузовые автомобили все большее количество электронных устройств, таких как активная подвеска, управление переключением передач и освещением, центральный замок и АБС.Чтобы эти электронные устройства функционировали согласованно, правильно распределяли время и обменивались данными, их необходимо соединить вместе.
В соответствии с существующими стандартами электропроводки электронные модули будут связываться друг с другом с помощью прямых аналоговых сигнальных линий точка-точка. Каждый модуль имел прямую линию, соединяющую его с другим модулем, который необходим для связи, архитектура, которая отнимала много времени и использовала чрезмерное количество проводов.
Каждый модуль имел прямую линию, соединяющую его с другим модулем, который необходим для связи, архитектура, которая отнимала много времени и использовала чрезмерное количество проводов.
Протокол CAN устраняет необходимость в чрезмерной проводке, позволяя электронным устройствам обмениваться данными друг с другом по одному мультиплексному проводу, который соединяет каждый узел в сети с главной приборной панелью.Мультиплексная архитектура позволяет объединять и передавать сигналы по всей сети по одному проводу, так что каждый электронный модуль в транспортном средстве своевременно получает данные от датчиков и исполнительных механизмов.
Протокол CAN был стандартизирован Международной организацией по стандартизации (ISO) в 1993 году и с тех пор разделен на два стандарта: ISO 11898-1, который описывает канальный уровень протокола, и ISO 11898-2, который описывает физический уровень. .Уникальные свойства протокола CAN-шины привели к его растущей популярности и распространению в отраслях промышленности, использующих встроенные сети, таких как здравоохранение, производство и развлечения.
Когда протокол CAN был впервые создан, его основная цель заключалась в обеспечении более быстрой связи между электронными устройствами и модулями в транспортных средствах при одновременном сокращении количества проводов (и количества меди), необходимых.Это достигается за счет использования мультиплексной проводки, которая позволяет комбинировать аналоговые и цифровые сигналы и передавать их по общей среде.
Чтобы понять, как мультиплексирование снижает стоимость электромонтажа транспортных средств, нам нужно немного больше узнать о том, как работала архитектура разводки до создания протокола шины CAN. Наряду с электронными устройствами или модулями, которые управляют подсистемами транспортного средства, легковые и грузовые автомобили также имеют датчики и исполнительные механизмы, которые собирают данные о работе транспортного средства и передают их модулям, где это необходимо.
Транспортное средство должно иметь датчики для сбора данных о его скорости и ускорении, но для подачи этих данных потребуются выделенные провода для каждого отдельного получателя данных — один провод для связи с системой подушек безопасности, один провод для связи с тормозной системой ABS, другой выделенный провод для управления двигателем и т. д. При использовании протокола CAN один провод соединяет все электронные системы, исполнительные механизмы и датчики в автомобиле в одну цепь, которая обеспечивает высокоскоростную передачу данных между всеми компонентами.
д. При использовании протокола CAN один провод соединяет все электронные системы, исполнительные механизмы и датчики в автомобиле в одну цепь, которая обеспечивает высокоскоростную передачу данных между всеми компонентами.
Первым автомобилем, в котором использовалась разводка шины CAN, было купе BMW 850, выпущенное в 1986 году. Внедрение архитектуры шины CAN сократило длину проводки в BMW 850 на 1,25 мили, что, в свою очередь, уменьшило его вес более чем на 100 фунтов. Исходя из текущей стоимости медной проводки, общая экономия на сэкономленных материалах составит почти 600 долларов. Не только это, но и скорость связи была увеличена со скоростью передачи сигнала от 125 кбит / с до 1 Мбит / с.
Низкая стоимость внедрения — одна из основных причин широкого распространения протокола CAN-шины.Меньше проводки означает меньше труда и меньшие материальные затраты для встроенных инженеров.
2. Встроенное обнаружение ошибок Одной из ключевых особенностей протокола шины CAN является то, что он поддерживает централизованное управление электронными устройствами, подключенными к сети.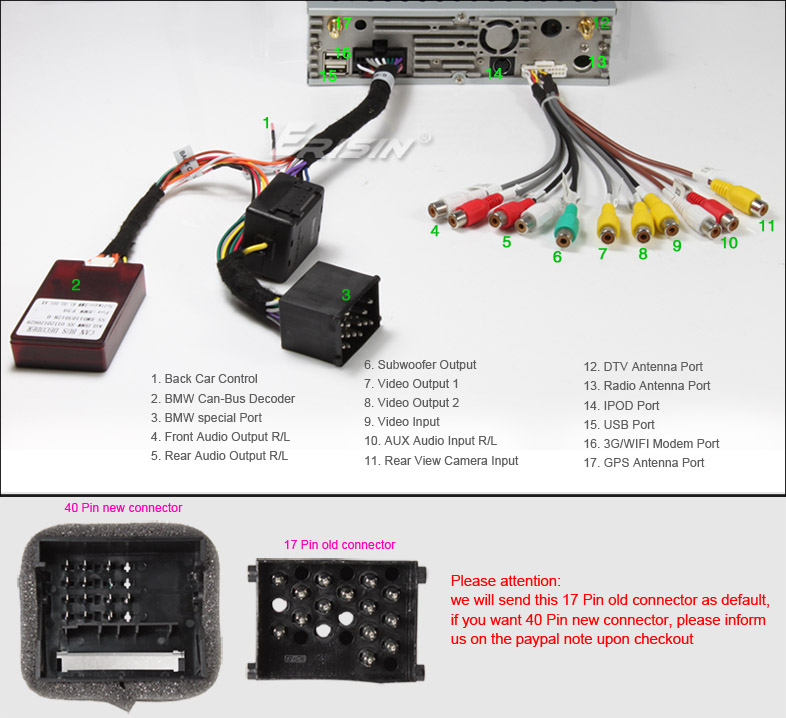 На физическом уровне CAN-шины каждое электронное устройство называется узлом. Узлы могут связываться с другими узлами в сети, и каждому узлу требуется микроконтроллер, контроллер CAN и передатчик CAN.
На физическом уровне CAN-шины каждое электронное устройство называется узлом. Узлы могут связываться с другими узлами в сети, и каждому узлу требуется микроконтроллер, контроллер CAN и передатчик CAN.
Хотя каждый узел может отправлять и получать сообщения, не все узлы могут обмениваться данными одновременно. Протокол CAN-шины использует метод, называемый побитовым арбитражем без потерь, для разрешения этих ситуаций и определения того, какой узел должен получить «приоритет» для передачи своего сообщения первым.
Обработка ошибок встроена в протокол CAN, при этом каждый узел проверяет наличие ошибок при передаче и поддерживает свой собственный счетчик ошибок. Узлы передают специальное сообщение Error Flag при обнаружении ошибок и уничтожают нарушающий трафик шины, чтобы предотвратить его распространение по системе.Даже узел, который генерирует ошибку, обнаружит свою собственную ошибку при передаче, увеличив свой счетчик ошибок и, в конечном итоге, приведет к отключению устройства и прекращению участия в сетевом трафике. Таким образом, узлы CAN могут как обнаруживать ошибки, так и предотвращать создание неисправными устройствами бесполезного трафика шины.
Таким образом, узлы CAN могут как обнаруживать ошибки, так и предотвращать создание неисправными устройствами бесполезного трафика шины.
Долговечность и надежность являются ключевыми аспектами при выборе протокола связи для развертывания в ваших встроенных инженерных проектах.При развертывании продуктов в реальной среде вы захотите выбрать протокол обмена данными, который является самоподдерживающимся, с возможностью продолжать работу в течение длительных периодов времени без внешнего обслуживания или вмешательства.
Эта необходимость делает возможности протокола по обнаружению ошибок особенно выгодными, поскольку они позволяют системам выявлять ошибки и восстанавливаться после них самостоятельно, без вмешательства извне. Есть пять механизмов обнаружения ошибок в протоколе CAN:
- Мониторинг бит
- Набивка бит
- Проверка кадра
- Подтверждение
- Циклический контроль избыточности
Линии высокоскоростной шины CAN обладают высокой устойчивостью к электрическим помехам, а контроллеры и трансиверы CAN, которые обмениваются данными с электронными устройствами, доступны в промышленных или расширенных диапазонах температур.
Кабель шины CAN обычно уязвим для режимов отказа, перечисленных в стандарте ISO 11898, например:
- CAN_H прерван
- CAN_L прерван
- CAN_H замкнут на напряжение аккумулятора
- CAN_L замкнут на массу
- CAN_H замкнут на массу
- CAN_L замкнут на напряжение аккумулятора
- CAN_L замкнут на провод CAN_H
- CAN_H и CAN_L прерваны в одном месте
- Потеря связи с оконечной сетью
Хотя большинство CAN-трансиверов не выдерживают подобных отказов, некоторые производители электроники создали отказоустойчивые CAN-трансиверы, которые могут обрабатывать все из них, хотя они могут иметь ограниченную максимальную скорость в качестве компромисса.Вместе эти функции расширяют применимость сетей CAN-Bus для приложений в самых суровых и сложных условиях.
4. Скорость Когда протокол CAN был впервые определен, он был описан на трех уровнях: уровне объекта, физическом уровне и уровне передачи. Позже, когда была создана спецификация CAN, конкретные определения для физического уровня были исключены. Это дало инженерам гибкость при проектировании систем со средой передачи и напряжением, которые соответствовали их предполагаемому применению.Позже, чтобы способствовать внедрению устройств и сетей CAN, стандарты были наконец выпущены для физической CAN позже в форме ISO 11898-2.
Позже, когда была создана спецификация CAN, конкретные определения для физического уровня были исключены. Это дало инженерам гибкость при проектировании систем со средой передачи и напряжением, которые соответствовали их предполагаемому применению.Позже, чтобы способствовать внедрению устройств и сетей CAN, стандарты были наконец выпущены для физической CAN позже в форме ISO 11898-2.
В настоящее время существует два определенных стандарта физического уровня, два типа протокола CAN, каждый со своими преимуществами и недостатками.
High Speed CAN обеспечивает скорость передачи сигнала от 40 кбит / с до 1 Мбит / с, в зависимости от длины кабеля. Протоколы шины на основе CAN, такие как DeviceNet и CANopen, используют этот физический стандарт для поддержки простых кабельных соединений с высокоскоростной передачей данных.
Низкоскоростная сеть CAN предлагает более низкие скорости передачи сигнала, которые могут начинаться со значения 40 кбит / с, но часто ограничиваются 125 кбит / с или около них. Более низкая скорость передачи сигналов позволяет продолжать связь по шине, даже когда происходит сбой проводки. В то время как высокоскоростные сети CAN оканчиваются на обоих концах линии шины резистором на 120 Ом, каждое устройство в низкоскоростной сети CAN имеет собственное завершение. Низкоскоростные сети CAN обладают большей отказоустойчивостью и уязвимы для меньшего количества режимов отказа, но более низкие скорости передачи делают их плохо подходящими для сетей, требующих быстрой и частой связи.
Более низкая скорость передачи сигналов позволяет продолжать связь по шине, даже когда происходит сбой проводки. В то время как высокоскоростные сети CAN оканчиваются на обоих концах линии шины резистором на 120 Ом, каждое устройство в низкоскоростной сети CAN имеет собственное завершение. Низкоскоростные сети CAN обладают большей отказоустойчивостью и уязвимы для меньшего количества режимов отказа, но более низкие скорости передачи делают их плохо подходящими для сетей, требующих быстрой и частой связи.
Чтобы оценить гибкость протокола CAN-шины в коммуникациях, нам нужно различать протоколы, основанные на адресах и сообщениях. В протоколе связи на основе адресов узлы обмениваются данными напрямую друг с другом, настраивая себя на один и тот же адрес протокола.
Протокол шины CAN известен как протокол связи на основе сообщений. В этом типе протокола узлы на шине не имеют связанной с ними идентифицирующей информации.В результате узлы могут быть легко добавлены или удалены (процесс, называемый горячей заменой) без выполнения каких-либо обновлений программного или аппаратного обеспечения в системе.
Эта функция позволяет инженерам легко интегрировать новые электронные устройства в сеть CAN-шины без значительных затрат на программирование и поддерживает модульную систему, которая легко модифицируется в соответствии с вашими спецификациями или требованиями.
Будущее протокола CAN-шины Технология шины CANполучила широкое распространение в различных отраслях промышленности.Благодаря его надежности, гибкости и связанной с этим экономии средств, мы видели сети CAN-шины, реализованные в:
- Грузовые автомобили, автобусы и прочая легковая техника
- Бензиновые и электрические автомобили
- Видеокамеры и системы освещения
- Игровые автоматы
- Оборудование для автоматизации зданий
- Промышленная автоматизация и производственное оборудование
- Медицинские изделия и инструменты
В будущем протокол шины CAN останется предпочтительной сетевой технологией для подключения электронных устройств, требующих частой и простой связи. Ethernet TCP / IP, ведущая альтернатива CAN-шине, по-прежнему не может обеспечить такие же низкие требования к ресурсам, дешевую реализацию, надежность и возможности восстановления после ошибок сетей CAN-шины. Мы продолжим видеть развертывание сетей CAN в устройствах IoT, приложениях промышленной автоматизации, подключенных медицинских устройствах и даже более требовательных и высокотехнологичных приложениях, таких как спутники и космические корабли.
Ethernet TCP / IP, ведущая альтернатива CAN-шине, по-прежнему не может обеспечить такие же низкие требования к ресурсам, дешевую реализацию, надежность и возможности восстановления после ошибок сетей CAN-шины. Мы продолжим видеть развертывание сетей CAN в устройствах IoT, приложениях промышленной автоматизации, подключенных медицинских устройствах и даже более требовательных и высокотехнологичных приложениях, таких как спутники и космические корабли.
Планируете ли вы использовать протокол шины CAN во встроенном инженерном проекте? Независимо от того, создаете ли вы продукт для автомобильного, военного, промышленного или аэрокосмического сектора, вам необходимо вложить средства в правильные инструменты, которые помогут вам программировать, отслеживать и отлаживать свой продукт.
Total Phase предоставляет инструменты с необходимыми функциями для отправки тестовых сообщений по сети CAN-шины или проведения ненавязчивого мониторинга для исследования сетевого трафика, обнаружения ошибок и их исправления как можно быстрее.